Download
1 / 31
310 likes | 338 Views
Learn how to design pneumatic systems using cascade control logic for efficient and precise operation in industrial applications. Explore the principles, components, and methods involved in creating a reliable pneumatic control system.

E N D
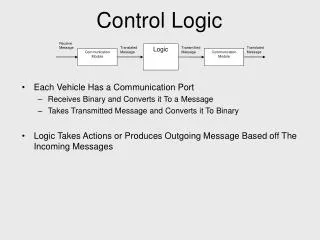
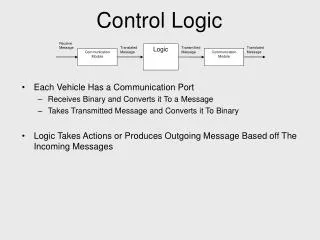
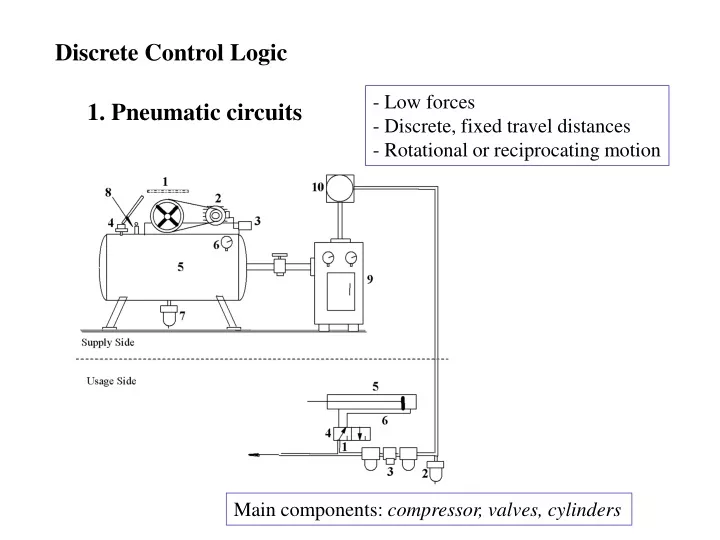
Discrete Control Logic - Low forces - Discrete, fixed travel distances - Rotational or reciprocating motion 1. Pneumatic circuits Main components: compressor, valves, cylinders
Pneumatic components: cylinders tepping away from this mat, the person has to manually switch the robot back ON
Pneumatic components: valves valve actuation
Simple Pneumatic control START, A+, A-
Pure Pneumatic control design: Cascade method Example: Punch Press Operation: (i) part is clamped in position (ii) press punches the part (iii) the clamp is released (iv) part is removed from the table START, A+, B+, B-, A-, C+, C- Functions of A, B, C ? How to design pneumatic system?
Pure Pneumatic control design: Cascade method • (1) Write cylinder action sequence • (2) Partition sequence into minimum no. of groups (no letter repeated in group) • (3) Merge last group, first group (if possible) • (4) Each cylinder is double-acting • (5) Each cylinder is controlled by 5/2 valve (both pilot lines: pneumatic) • (6) Each + and – position of cylinder: limit valves • (7) Each group => manifold line. • The manifold line connects to the limit valves associated with the cylinders. • (8) The air pressure in the manifolds is controlled by 5/2 valves called group valves. • no. of group valves = (no of groups – 1)
Cascade method: forming groups START, A+, B+, B-, A-, C+, C- Break it down into groups: START, A+, B+ / B-, A-, C+ / C- GRP 1 GRP 2 GRP 3 Merge Group 3 with Group 1 ? START, A+, B+ / B-, A-, C+ / C- GRP 1 GRP 2 GRP 1
Cascade method: draw cylinders, manifolds, valves - Draw the cylinders - For each cylinder, draw the limit valve (3/2 way) - For each cylinder, draw the control valve - Draw manifold lines - Limit valve connections: a2, b2 and c1 get their air supply from manifold 1 a1, b1 and c2 get their air supply from manifold 2 - Group valve connections: air supply: initially to GRP 1 (manifold 1), when pilot line 1 is active. line 1: activated by c2 (transition from GRP 2 GRP 1) line 2: activated by b2 - Connect air supply of each cylinders valve, and supply + and – ports of each cylinder - Connect the logic lines according to sequence: START A+ B+ B- A- C+ C-
- pneumatics timer control: delay valves. Pure Pneumatic Controls - For more complex logic, difficult to debug - Less versatile than electronic control (e.g. no counters, poor timer control)
Programmable Logic Controllers History: avoiding complex/large relay boards - Why are relay boards required? PLC Basics: computer + relays
PLC: example 1 Pressure_Switch is ON Warning_Light ON
PLC: example 1 STEP 1: Write this logic into a PROGRAM STEP 2: Load program into PLC STEP 3: Connect the sensor output to External Input terminal. STEP 4: Connect the PLC External Output Terminal to Warning Light STEP 5: EXECUTE the logic program on the PLC.
PLC: example 1 Programming language: LADDER LOGIC
PLC: example 1 Programming language: LADDER LOGIC THEN IF
PLC: example 2 Outer mat ON warning light ON Inner mat ON warning light ON AND Robot OFF Stepping away from inner mat Manually switch robot ON
PLC: example 2 Two actuators: Warning light, Robot master switch LOGIC for Warning light External Input 1: outer mat External Input 2: inner mat External output: light
PLC: example 2 LOGIC for Warning Light LOGIC for Robot PROBLEM ?
PLC: example 2 LOGIC for Robot Robot must STAY OFF until manual reset to ON Solution: LATCH Internal (logical) relay External Input 2: inner mat latch External output: robot
PLC: example 2 LOGIC for Robot Robot must STAY OFF until manual reset to ON
Ladder Logic Programs Switch (Relay) naming conventions Lecture notes (Rockwell™ Automation PLC): External inputs: I:0/1, I:0/2, …, I:1/1, I:1/2, … I:n/m External outputs: O:0/1, O:0/2, …, O:1/1, O:1/2, … O:n/m Internal Relays: B0, B1, … etc. Lab (SMC™ PLC): External inputs: X0, X1, … External outputs: Y0, Y1, …, Internal Relays: R0, R1, … etc.
PLC Example: XOR Logic A xor B: (A is ON AND B is OFF) OR (A is OFF AND B is ON)
Ladder Logic: Timers Solenoid actuated door-lock Solenoid ON Door unlocked Solenoid actuated when: (i) ON signal from number-pad outside door (ii) ON signal from door-open switch inside door Solenoid ON for 5 sec, then OFF While O:0/1 remains ON, Timer COUNTS DOWN from PRESET COUNT DOWN = 0 ( T4:1) set to ON
Ladder Logic: Timers Solenoid actuated door-lock Solenoid ON Door unlocked Solenoid actuated when: (i) ON signal from number-pad outside door (ii) ON signal from door-open switch inside door Solenoid ON for 5 sec, then OFF
Ladder Logic: Timers -- reset Solenoid actuated when: (i) ON signal from number pad outside door (ii) ON signal from door-open switch inside door Solenoid ON for 5 sec, then OFF During ON, if button is pressed, Timer resets to PRESET During ON, light indicator is ON LEGEND: I:0/1 door-open I:O/2 card-reader O:0/1 solenoid O:0/2 light indicator
Ladder Logic: counters Count the number of occurrences of an event Examples: Pallet loading in factory After 10 parts arrive on conveyor, worker comes to load pallet Pneumatic press hammer Hit the part 20 times, then wait for part to be unloaded Rice cooker alarm Beep 5 times when rice is cooked EVENT: switch goes from OFF ON
Ladder Logic: counters Pallet loading in factory After 4 parts arrive on conveyor: STOP conveyor belt turn ON the indicator light
Ladder Logic: car wash Car arrives limit switch ON Limit switch ON Washer ON Washer ON: (i) Soapy water SPRAY ON (30 secs) (ii) Rinse: clean water SPRAY ON (30 secs) (iii) Automatic scrubber brushes car (15 secs) (iv) After washing 50 cars, the scrubber brush Auto-change
Car arrives limit switch ON Limit switch ON Washer ON Washer ON: (i) Soapy water SPRAY ON (30 secs) (ii) Rinse: clean water SPRAY ON (30 secs) (iii) Automatic scrubber brushes car (15 secs) (iv) After washing 50 cars, the scrubber brush Auto-change
Programming a PLC (1) Hand held console (direct feed of program into PLC) (2) Computer-interface: (i) Complete the program on a computer (ii) Test the program on PC (iii) Upload the program to the PLC processor memory (persistent) (iv) Connect external Inputs and Outputs (v) Run the program on PLC