Download
1 / 22
220 likes | 408 Views
DBP2: Software Integration for Image Guided Surgery. Gabor Fichtinger & Andras Lasso Queen’s University, Canada. Goals. Applications for Image-guided needle based interventions Robotic prostate interventions Spinal interventions w/ Augmented Reality

E N D
DBP2: Software Integration for Image Guided Surgery Gabor Fichtinger & Andras Lasso Queen’s University, Canada
Goals • Applications for Image-guided needle based interventions • Robotic prostate interventions • Spinal interventions w/ Augmented Reality • Develop new 3D Slicer features relevant to Robotics and CAI • Promote 3D Slicer in the Robotics and CAI communities
Coordinates CT,MRI, US, X-ray Imager: Planning & control computer Patient Robot Digital images Physician Point & Click Surgery, 1999
Grand Hypothesis It is possible to architect robotic intervention systems that to a reasonable extent are invariant to imager, robot, and even the clinical application
Robotic IGS Workflow • Modeling • Planning • Robot Registration • Targeting & Monitoring • Verification
A1: Robotic Prostate Biopsy Krieger et al. IEEE TMBE, 2005 (Best paper in 2005-2009)
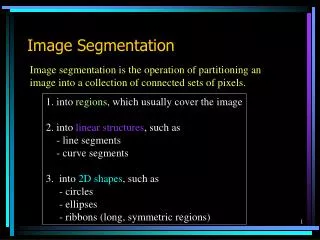
Planning – Segmentation /1 Tannenbaum et al.
Planning – Segmentation /2 Tannenbaum et al.
Rectum Trans-rectal coil Needle trajectory Prostate Fiducials Robot Registration
A2: Augmented Reality Fichtinger et al. IEEE TMBE, 2005 Fischer et al. JCAS, 2007
Workflow Fischer et al. JCAS, 2007
Planning Vikal et al. CMIG, 2009
The Perk Station Vikal et al. CMIG, 2009
Perk Station Interface Vikal et al. CMIG, 2009