Download
1 / 24
• 240 likes • 384 Views
ROBUST VISUAL TRACKING A Brief Summary. 1. Gagan Mirchandani School of Engineering, University of Vermont. 1. And Ben Schilling, Clark Vandam, Kevin Haupt. Algorithms from [1],[2]. Examples from [2]. Videos from [3]. [1] J.Wright, A.Y.Yang, A.Ganesh, S.S.Sastry and Y.Ma,

E N D
ROBUST VISUAL TRACKINGA Brief Summary 1 Gagan Mirchandani School of Engineering, University of Vermont 1 And Ben Schilling, Clark Vandam, Kevin Haupt
Algorithms from [1],[2]. Examples from [2]. Videos from [3]. [1] J.Wright, A.Y.Yang, A.Ganesh, S.S.Sastry and Y.Ma, "Robust Face Recognition via Sparse Representation" IEEE Trans. PAMI , Feb. 2009, Vol.31, Issue:2, pp.210-227. [2] X.Mei and H.Ling, "Robust Visual Tracking and Vehicle Classication via Sparse Representation" IEEE Trans. PAMI , Nov. 2011, Vol.33, Isssue:11, pp.2259-2272. [3] Ben Schilling, Clark Vandam, Kevin Haupt
1. Introduction • Background, Goals • Tracking and Recognition - important topics in Computer Vision • Studied for decades • An accelerated algorithm for the simulation of the Ising Model is presented, based on a hierarchical decomposition of the model using the discrete wavelet transform, employing the Haar wavelet. An empirically derived relationship between the temperature in the original model, , and an optimal temperature in the wavelet decomposed model, , is discovered for various levels of wavelet decomposition. This temperature scaling relationship improves the accuracy of estimates of the thermodynamic quantities within the vicinity of the critical region as compared to previous methods.
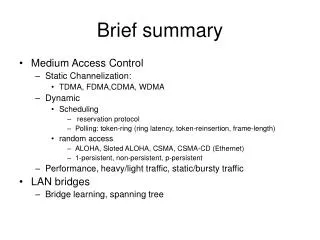
2. Problem Areas •• Tracking, recognition and counting objects (pedestrians, vehicles, bicyclists, etc. etc.) • Needed for Policy determination, optimal traffic management, reduction of fuel, CO2 emission, etc.• Needed for Surveillance • Needed for Robotics
3. Challenges • Occlusion, noise, cluttered real-world environment • Illumination change, many people, changing pose • Changing background, real-time online implementation • Computational complexity grows exponentially
4. Theory Basic problem: Given measurements y - Find x
Bayesian State Estimation If f and h linear (and noise Gaussian) then we get the Kalman filter
Target candidate represented as sum of 10 templates (from previous frames) and trivial templates
Estimation Method • Particle filters numerically generate the particles • according to the pdf • This is tracking. The particle filter propagates sample pdfs over time • Computational effort often a bottleneck
Target candidate represented as sum of 10 templates (from previous frames) and trivial templates
Person walking; passing pole, high grass, body movement, occlusion.
Video taken from car in the back. Doll has pose & scale change and occlusion
o Face rotates 180 . Car moves out of frame.