Download
1 / 1
10 likes | 204 Views
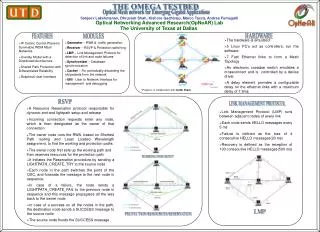
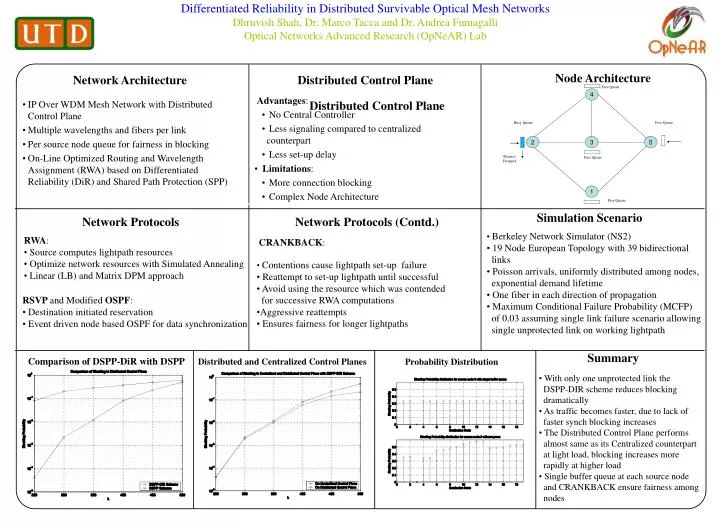
Differentiated Reliability in Distributed Survivable Optical Mesh Networks Dhruvish Shah, Dr. Marco Tacca and Dr. Andrea Fumagalli Optical Networks Advanced Research (OpNeAR) Lab. Free Queue. 4. Busy Queue. Free Queue. 2. 3. 5. Request Dropped. Free Queue. 1. Free Queue.

E N D
Differentiated Reliability in Distributed Survivable Optical Mesh Networks Dhruvish Shah, Dr. Marco Tacca and Dr. Andrea Fumagalli Optical Networks Advanced Research (OpNeAR) Lab Free Queue 4 Busy Queue Free Queue 2 3 5 Request Dropped Free Queue 1 Free Queue Node Architecture Network Architecture Distributed Control Plane Advantages: • No Central Controller • Less signaling compared to centralized counterpart • Less set-up delay • Limitations: • More connection blocking • Complex Node Architecture Distributed Control Plane • IP Over WDM Mesh Network with Distributed Control Plane • Multiple wavelengths and fibers per link • Per source node queue for fairness in blocking • On-Line Optimized Routing and Wavelength Assignment (RWA) based on Differentiated Reliability (DiR) and Shared Path Protection (SPP) Simulation Scenario Network Protocols Network Protocols (Contd.) • Berkeley Network Simulator (NS2) • 19 Node European Topology with 39 bidirectional • links • Poisson arrivals, uniformly distributed among nodes, • exponential demand lifetime • One fiber in each direction of propagation • Maximum Conditional Failure Probability (MCFP) • of 0.03 assuming single link failure scenario allowing • single unprotected link on working lightpath • RWA: • Source computes lightpath resources • Optimize network resources with Simulated Annealing • Linear (LB) and Matrix DPM approach • CRANKBACK: • Contentions cause lightpath set-up failure • Reattempt to set-up lightpath until successful • Avoid using the resource which was contended • for successive RWA computations • Aggressive reattempts • Ensures fairness for longer lightpaths • RSVP and Modified OSPF: • Destination initiated reservation • Event driven node based OSPF for data synchronization Summary Comparison of DSPP-DiR with DSPP Distributed and Centralized Control Planes Probability Distribution • With only one unprotected link the • DSPP-DIR scheme reduces blocking • dramatically • As traffic becomes faster, due to lack of • faster synch blocking increases • The Distributed Control Plane performs • almost same as its Centralized counterpart • at light load, blocking increases more • rapidly at higher load • Single buffer queue at each source node • and CRANKBACK ensure fairness among • nodes