Download
1 / 17
431 likes | 1.18k Views
Chapter 4: Feedback Control System Characteristics O bjectives.

E N D
Chapter 4: Feedback Control System CharacteristicsObjectives In this chapter we extend the ideas of modeling to include control system characteristics, such as sensitivity to model uncertainties, steady-state errors, transient response characteristics to input test signals, and disturbance rejection. We investigate the important role of the system error signal which we generally try to minimize. We will also develop the concept of the sensitivity of a system to a parameter change, since it is desirable to minimize the effects of unwanted parameter variation. We then describe the transient performance of a feedback system and show how this performance can be readily improved. We will also investigate a design that reduces the impact of disturbance signals.
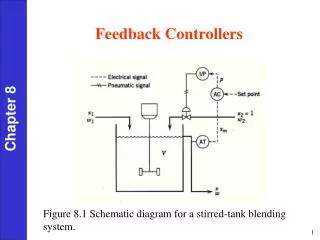
Open-And Closed-Loop Control Systems An open-loop (direct) system operates without feedback and directly generates the output in response to an input signal. A closed-loop system uses a measurement of the output signal and a comparison with the desired output to generate an error signal that is applied to the actuator.
Open-And Closed-Loop Control Systems Error Signal
Sensitivity of Control Systems To Parameter Variations For the closed-loop case if > GH ( s ) 1 1 Output affected only by H(s) × Y ( s ) R ( s ) H ( s ) + D G ( s ) G ( s ) Open Loop D D × Y ( s ) G ( s ) R ( s ) Closed Loop ( ) + D G ( s ) G ( s ) + D × Y ( s ) Y ( s ) R ( s ) ( ) + + D × 1 G ( s ) G ( s ) H ( s ) D G ( s ) D × Y ( s ) R ( s ) ( ) + + D + 1 GH ( s ) GH ( s ) ( 1 GH ( s ) ) > D GH ( s ) GH ( s ) D The change in the output of the closed system G ( s ) D × Y ( s ) R ( s ) is reduced by a factor of 1+GH(s) 2 + ( 1 GH ( s ) )
Y ( s ) T ( s ) R ( s ) d T æ ö D T ( s ) d T d ç ÷ T è ø T ( s ) T d T G × S S æ ö æ ö D G ( s ) T d d ç ÷ G G ç ÷ G ( s ) è ø d G d G ç ÷ è ø G 1 T ( s ) + × 1 H [ ( s ) G ( s ) ] æ ö æ ö d d ç ÷ ç ÷ T T è ø è ø d T G d T G 1 G T × × × S G æ ö æ ö T T 2 G d d + ( 1 GH ) ç ÷ ç ÷ G G è ø è ø ( 1 + GH ) d G d G 1 T Sensitivity of the closed-loop to G variations reduced S G + ( 1 GH ) - Sensitivity of the closed-loop to H variations GH T S H When GH is large sensitivity approaches 1 + ( 1 GH ) Changes in H directly affects the output response Sensitivity of Control Systems To Parameter Variations
The Cost of Feedback • Increased Number of components and Complexity • Loss of Gain • Instability
Design Example: English Channel Boring Machines Study system for different Values of gain K G Td
Study Examples of 4.9 - Control Systems Using MATLAB And Apply concepts performing Lab 3