Download
1 / 10
100 likes | 253 Views
Cell-Projection of Convex Polyhedra. Stefan Roettger Thomas Ertl University of Erlangen. Introduction. Unstructured volume rendering Cell-projection = PT algorithm of Shirley and Tuchman (’90) Main bottlenecks: sorting and tetrahedral decomposition (Wittenbrink ‘99)

E N D
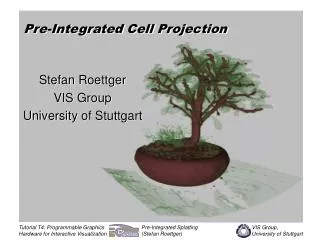
Cell-Projectionof Convex Polyhedra • Stefan Roettger • Thomas Ertl • University of Erlangen
Introduction • Unstructured volume rendering • Cell-projection = PT algorithm of Shirley and Tuchman (’90) • Main bottlenecks: sorting and tetrahedral decomposition (Wittenbrink ‘99) • Current performance 600,000 tet/s (Guthe ‘02) • Above 1,000,000 tet/s performance is completely memory bandwidth limited
Emissive Optical Model • Use emissive optical model (Max ‘95) • Does not require sorting • Ray integral = length of ray segment times average emission (assuming linear interpolation)
Projection of Convex Polyhedra • The graphics hardware can take over the projection of arbitrary convex polyhedra • Based on bounded layered fog (Mech JGT ‘01)
PCP Algorithm • 1st pass • enable A writing and front face culling • draw primitive with alpha=(d-min d)/d • 2nd pass • enable subtractive blending and back face culling • draw primitive again • 3rd pass • disable A writing and culling • enable additive blending with alpha multiplied • draw primitive with rgb=emission/2
Performance • Emissive model: 212,000 hex/s on NVIDIA GeForce3 (Guthe ‘02: 120,000 hex/s) • For maximum intensity projection one only needs to render each face once • Performance is about 600,000 hex/s • Performance drop is mainly due to additional passes
Example Images Campfire 50 fps Bluntfin 8 fps Neghip 22 fps
Ground Fog • Triangulated terrain • Place prism on every base triangle • Assume constant emission in each prism
Emission vs. MIP 50 fps 25 fps
Fin Thanks for your attention!