Download
1 / 4
50 likes | 230 Views
Active Elements:. AVR. AVR. AVR. Motor. Motor. Motor. System (Virtual Machine) - Adaptable for varieties of task as possible using generic components. VM. IP. IP. IP. IP. ..…. Components: - Generic and Minimum as possible.

E N D
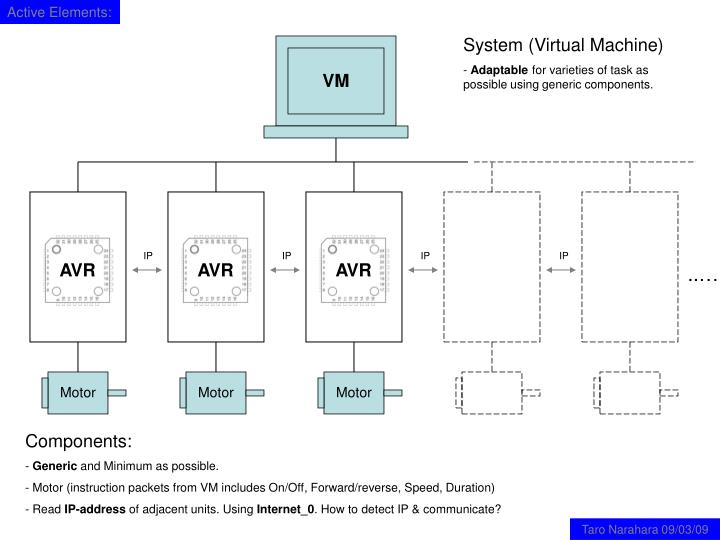
Active Elements: AVR AVR AVR Motor Motor Motor System (Virtual Machine) - Adaptable for varieties of task as possible using generic components. VM IP IP IP IP ..… • Components: • - Generic and Minimum as possible. • Motor (instruction packets from VM includes On/Off, Forward/reverse, Speed, Duration) • Read IP-address of adjacent units. Using Internet_0. How to detect IP & communicate? Taro Narahara 09/03/09
Active Elements: AVR AVR AVR AVR Motor Motor Motor Motor • System (Virtual Machine) • Reconstruct global topology from local connectivity information from each components using Internet-0. • Mental Picture inside the VM VM IP IP IP IP ..… Physical Machine Taro Narahara 09/03/09
Active Elements: AVR AVR VM 0 0 5 0 3 0 0 6 2 0 0 6 2 3 0 1 2 3 4 5 0 3 4 7 0 3 0 5 0 0 Physical Direc: TOP IP : null; Rotation: null State: null Speed: null Duration: null • Reconstruct Configuration • Simulate Movements in VM • Send Instructions to Robots Direc: RIGHT IP address: 120; Rotation: 0 degree States: On/Off Forward/Reverse Speed: 0 Duration: 0 ms Direc: LEFT IP address: null; Rotation: null State: null Speed: null Duration: null Top Left Right Down Direc: DOWN IP : null; Rotation: null State: null Speed: null Duration: null Taro Narahara 09/03/09
Active Elements: VM 0 0 5 0 3 0 0 6 2 0 0 6 2 3 0 1 2 3 4 5 0 3 4 7 0 3 0 5 0 0 Feedback • Send Instructions to Robots • Move Robots • Measure Performance • (Distance moved, Amount of • Solar-exposure, etc.) • Adjust VM simulation based on Feedback from Physical robots. • Simulates again & send updated instructions. • It is more ambitious to do all this by local communications among components without VM. (fully distributed control) Physical 0 0 5 0 3 0 3 4 7 0 1 2 3 4 5 0 6 2 3 0 0 0 6 2 0 3 0 5 0 0 Taro Narahara 09/03/09