Download
1 / 22
220 likes | 251 Views
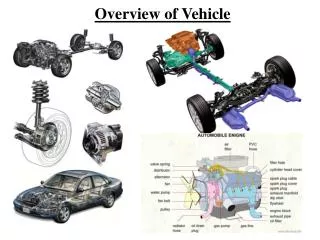
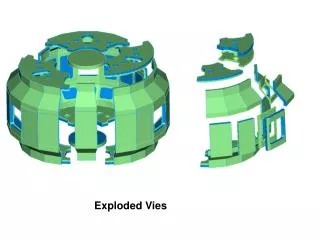
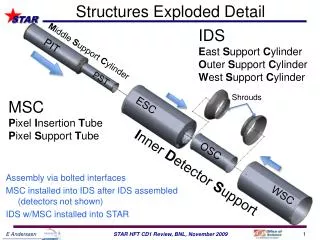
Overview of the Mechanical Engineering in Autosub Pete Stevenson C.Eng Mechanical engineer on Autosub project. Exploded View of Vehicle. Centre Section Pressure Hulls. Syntactic foam segment cast over CFRP tube. Aluminium end dome with ports. Tail Section with Panel Removed.

E N D
Overview of the Mechanical Engineering in AutosubPete Stevenson C.EngMechanical engineer on Autosub project
Centre Section Pressure Hulls Syntactic foam segment cast over CFRP tube Aluminium end dome with ports
Tail Section with Panel Removed • Direct drive DC motor - no gear box or shaft seal~ 70+% efficiency • Specially designed propeller - 250 N thrust. Individually replaceable • Actuators pressure balanced: no shaft seals • Polyurethane frangible fins
Fin actuators Electronics case Cross shaft and split clamp
Schematic of Emergency Abort System Electronics housing Solenoid Inner weight Outer weight Frame fixed to outer panel Springs to eject weight
“Jack in the Box” released by radio remote control to deploy recovery line
Vehicle Trim and Buoyancy Basic set Up :- 8 to 10 kg buoyancy Neutral Trim +/-3kg.m
Diving routine:- 60s run up 650W, Sternplanes up Sternplanes full down for diving Control on max pitch until demand depth is reached
Autosub Batteries Batteries assembled in packs of 75 in series. c.113Volt, 10.5kg max/pack 17 packs/pod, max battery payload c68 packs. End domes with power harness may be fitted to either end; thus choice of loading batteries from nose or tail end. Individual battery packs tested for 5 sec at 1.5 x working load by manufacturer and on assembly into Autosub. Data logger records pod voltage, pod current, temperature.
Lab’ space with >3m of bench, power supplies, PC, printer, ghetto blaster. nice selection of CD’s. Other space for acoustic telemetry gear, integrated positioning system (IPS), Gonios Argos Aerial GPS Aerial Radio Modem Aerial Orbcomm aerial Storage for batteries, spares etc. Hydraulic supply 207 bar, 140l/min Deck space approx 12m x 3m PES fish