Download
1 / 21
210 likes | 230 Views
Learn about fuzzy logic, natural reasoning, and fuzzy control for intelligent control systems. Understand Fuzzy Inference principles, fuzzy set operations, and fuzzy control rules. Discover how to implement Fuzzy Inference in engineering methodology.

E N D
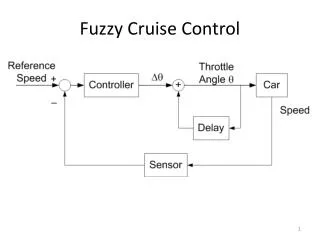
EngineeringEducationMethodologyon Intelligent Control(Fuzzy Logic and Fuzzy Control) M.Yamakita Dept. of Mechanical and Control Systems Eng. Tokyo Inst. Of Tech.
Natural Reasoning IF he/she is Tall, THEN his/her foot is Big. IF his/her foot is Big, THEN his/her shoe’s are Expensive. IF he is Tall, THEN his shoe’s are Expensive. IF he/she is Tall, THEN his/her foot is Big. Mr. Smith is Tall. Mr. Smith’s foot is Big.
Condition part (Antecedent part) Conclusion (Operation part) Implication operator Inference (Reasoning) Formal Logic Crisp Expert System A → B A → B B → C IFATHEN B Ais true IFATHENB A IFBTHENC A → C B B is true IFATHENC HypotheticalSyllogism ModusPonens
Crisp Logic Tall ] Mr.A 181cm ( 170cm ] ( Mrs.B 177cm Short (
IF he is Tall, THEN his foot is Big. Mrs. B is Tall. Mrs. B’s foot is Big. × Mr. A is Very-Tall. Mr.A’s foot is Very-Big. Mr. A is Very-Tall. Natural Reasoning
A → B IFATHEN B A’is true A’ B’ Fuzzy Logic (Fuzzy Inference) B’ A’ A → B B’ is true A → B A’ A → B B → C B’ IFATHENB B → C IFBTHENC B’ A’ → C’ IFA’THENC’ A’ → C’
How To Realize Fuzzy Inference ? Introduction of membership function ! We consider a member of a set as well as the degree of the membership. Degree of property 100% 50% 30% ) x 170 180 190 Height Tall Very Tall
Representation of Fuzzy Set 1.Countable Set 2. Uncountable Set
Example 1. Countable Case Membership Function 1.0 0.5 x 170 180 190 Height Tall Very Tall
1. Uncountable Case Membership Function 1.0 0.5 x 170 180 190 Height Tall Very Tall
Fuzzy Set Operations 1. Implication 2. Union 3. Intersection 4. Compliment
FuzzyRelation Definition [Fuzzy Relation] Letassume that X and Y are sets. Fuzzy relation R of X and Y is a fuzzy subset of X x Y as fuzzy relation R of is In general,
Composition of Relations Definition [Composition of Fuzzy Relations] Let R and S are fuzzy relations, i.e., Composition of fuzzy relations, R and S, is a fuzzy set defined by R S X Z Y is If A is a fuzzy set and R is a fuzzy relation,
B’ is true A → B IFATHEN B A’is true A’ B’ Fuzzy Inference Direct Method (Mamdani) (Max-MinComposition) Caution! A’ and B’ are Fuzzy Sets.
A=Tall B=Big A’=Very Tall If he/she is tall then his/her foot is big. He is very tall. If he/she is tall then his/her foot is big. He is 178cm tall. A=Tall B=Big A’=178 B’ is still Fuzzy Set A’ is not fuzzy set or Defuzzy value
= Rule n : If x is and y is then z is o o o o A B and and y y is is Fuzzy Control Rules C A B = Rule 1 : If x is and y is then z is 1 1 1 C A = B Rule 2 : If x is and y is then z is 2 2 2 . . A B C n n n Input x is Output
Defuzzication Control Input is Number Defuzzication If x and y are defuzzy values, This operation is sometimes replaced by x (multiplication)
NB NS ZO PM PB NM PS 1 -1 PS PS Triangular Membership Function Example If x is NS, and y is PS, then z is PS If x is ZO, and y is ZO, then z is ZO R1: R2: NS R1 PS ZO ZO ZO R2
PS PS PS Simplification NS R1 PS ZO ZO ZO R2 Further Simplification (Height Method) NS PS R1 PS ZO ZO ZO R2
PS TS(Takegaki-Sugeno)Model • Singleton Fuzzifier • ProductInference • Weighted Average Deffuzifier PM PS R3 PS PS PS R4
References • S.Murakami: Fuzzy Control , Vol. 22, Computer and Application’s Mook, Corona Pub.(1988) in Japanese • K.Hirota: Fuzzy !?, Inter AI (Aug,88-June,90) in Japanese • S.S.Farinwata et. Ed.: Fuzzy Control, Wiley (2000)