Download
1 / 36
360 likes | 531 Views
GaS : Genetic Algorithm Synthesis. University of Ottawa Rami Abielmona ( rabielmo@site.uottawa.ca ) Dr. Voicu Groza ( groza@site.uottawa.ca ) School of Information Technology Engineering. Technology Mapping Evolved. Presentation Outline (1). Some self-imposed Q&As Research objectives

E N D
GaS : Genetic Algorithm Synthesis University of Ottawa Rami Abielmona (rabielmo@site.uottawa.ca) Dr. Voicu Groza (groza@site.uottawa.ca) School of Information Technology Engineering Technology Mapping Evolved
Presentation Outline (1) • Some self-imposed Q&As • Research objectives • Genetic algorithms • Evolvable hardware • Technology mapping • “If the shoe fits…” • Project detailed description • System level • Optimizer/Host subsystems
Presentation Outline (2) • System operation • Novelties and applications • LUT value and routing evolution • Selection algorithm • Evolutionary stages • hcache • Limitations / Obstacles • Future enhancements / Future work • Contact information • Summary
What are we trying to do? • Attempting to evolve the minimized logic solution of a defined Boolean input function • The evolution is done through a hardware implementation of a genetic algorithm (GA), while the minimization is one of FPGA look-up tables (LUTs) and logic levels • Proof of concept involves the comparison to other minimization techniques as well as human methods • The objectives of the research are as follows: • Minimize the logic of simple Boolean functions; • Evolve the logical circuits of simple structures; • Expand to evolve minimized complex blocks
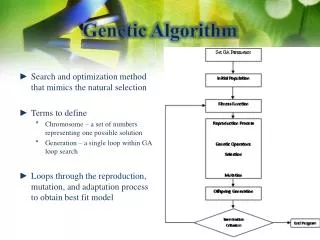
What are genetic algorithms? • Genetic algorithms are search techniques modeled after natural selection, including the associated genetic operators • GAs were developed by John Holland at the University of Michigan • GAs are stochastic algorithms with very simple operators that involve random number generation, and copying and exchanging string structures • The three major operators are : selection, mutation and crossover, with fitness evaluation acting as a control factor in the feedback path • GAs fair well in large search space problems, as better solutions tend to “grow old with time”
What is evolvable hardware? • Evolware is a term coined by Hugo De Garis in 1992 • Consists of reconfigurable hardware that can undergo a number of evolutionary cycles to produce a solution • The introduction of field-programmable gate arrays (FPGAs) has allowed for the birth of evolware • Powerful combination of evolutionary algorithms (EAs) and programmable logic devices (PLDs) “re-wires” a potential solution in a very short time step • First major breakthrough accomplished by Adrian Thompson’s tone discriminator in 1996 • Intrinsic vs. extrinsic evolware
What is technology mapping? • Technology mapping is the process by which a circuit is realized on a target chip, after its logic synthesis • For example, technology mapping involves the transformations needed to take a AND-OR logic circuit into a NAND-only circuit • Another example involves converting to a LUT-based target chip (used in our research) • We use functional decomposition (Roth-Karp) in order to map to LUT-based FPGA architectures (such as Xilinx) • The goal here is to minimize the number of LUTs used in the implementation of the Boolean logic function
So, what is the problem? • “How will GaS benefit circuit synthesis ?” • Proven that GAs are very efficient in locating a solution in a large search space • The number of possible subfunctions exponentially increases as the number of inputs increases • Unhelpful subfunctions are progressively eliminated through the evolutionary runs • Yields numerous solutions which can be further studied for various other minimization factors • Parallelism, adaptation & fault-tolerance • Test bed for “evolutionary agents” concept
I. System architecture Project Details • Introduces optimizer/host • Shows intended functionality II. Optimizer module • Introduces HIGA/ECLBs/hcache • Shows breakdown of functionality III. Optimizer architecture • Introduces project intricacies • Shows implementation of functionality
System Architecture • Both optimizer and host are PLDs • Optimizer is where function is evolved • Host is where circuit is tested • Optimizer/Host = Server/Client • Multiple hosts can connect to one optimizer • Multiple functions can be evolved on one optimizer Figure 1
Optimizer Module • HIGA • Much faster because done mostly in H/W • Adds caveats on the std. GA • ECLBs • Where the chromosomes are evaluated for fitness assignment • hcache • Common DB for future use Figure 2
Optimizer Architecture (1) Figure 3
Optimizer Architecture (2) • HIGA details • RNG – produces pseudo-random numbers • Selection – uses a hybrid algorithm to select a member for the next generation • Mutover – perform standard single-point crossover and single-bit mutation • Fitness – evaluates the fitness of each individual • Input Instantiation – provides stored ideal outputs • Shared memory – provides a common storage space
Optimizer Architecture (3) • Device driver details • Controls the execution of the HIGA through the CPU interface • Allows for the communication path between the simulator and the HIGA, through the JNI (Java Native Interface) • A Java Virtual Machine (JVM) is instantiated from the device driver in order to assemble the valid bitstream encoded in the chromosome • Device drivers are implemented in the C++ language
Optimizer Architecture (4) • Host details • Currently being simulated through the use of an innovative set of APIs, developed at Xilinx Inc. called JBits • Provides a fast and simple interface to the Xilinx Virtex family of FPGAs • The Xilinx Hardware Interface (XHWIF) allows for the use of prototyping boards instead of the simulator as the need arrives • Receives candidate chromosome, proceeds to “burn” it into the simulator, apply input test vectors and send back the experimental outputs • The host was implemented in the Java language
Optimizer Architecture (repeat) Figure 3
Optimizer Architecture (5) • Implementation details • HIGA was designed using the VHDL (RTL code), and all using the Algorithmic State Machine (ASM) design • Combination allows for a deep understanding of the actual implementation and consequent functionality of system • A memory access module (MAM) allows for the communication with the on-board memory as well as the device drivers • Inputs to system are GA parameters and input truth table • Using the H.O.T. II prototyping platform from Virtual Computer Corporation (VCC) as the optimizer environment
System Operation (1) Figure 4
System Operation (2) Figure 5
Novelties (1) • LUT value AND routing evolution • Delon Levi and Steven Guccione of Xilinx Inc. have worked on GeneticFPGA, a Java based tool based on the HereBoy algorithm, which evolves the LUT values, but uses static routing • GaS evolves BOTH the LUT values and the inter-CLB as well as the intra-CLB routing in order to find a correct solution to the input function (first of its kind) • GaS has many more solutions to search through, but does have a higher inclination to find a better (minimal) solution • GaS guarantees synchronous designs, by ensuring the absence of asynchronous feedback loops and clock gating
Novelties (2) • GA caveats • A hybrid of the roulette wheel selection and tournament selection algorithms, as follows: • Select a member using roulette; • Select another member using roulette; • Compare a random number r to a preset parameter k, and if r < k, then select the member with the higher fitness, otherwise select the member with the lower fitness • Repeat until the population is full • Ensures a cast-type system is utilized • This is also a VGA, in that the mean size of the chromosomes changes to match problem complexity
Novelties (3) Figure 6
Novelties (4) • Evolutionary stages • There are 5 stages of evolution • Stage 1 : 1 CLB & 1 potential subfunction • Stage 2 : 2 CLBs & 2 potential subfunctions • Stage 3 : 4 CLBs & 4 potential subfunctions • Stage 4 : 8 CLBs & 8 potential subfunctions • Stage 5 : 16 CLBs & 16 potential subfunctions • Only feed-forward paths are allowed, and LUT inputs are guaranteed to be registered outputs • Currently, CAD tools can map any 8 input function into 16 CLBs, but only selected functions of greater than 8 inputs
Novelties (6) • Chromosome structure • Number of bytes per chromosome per stage • Stage 1 : 8 bytes = 2 longword transfers • Stage 2 : 12 bytes = 3 longword transfers • Stage 3 : 20 bytes = 5 longword transfers • Stage 4 : 48 bytes = 12 longword transfers • Stage 5 : 116 bytes = 29 longword transfers • Maximum amount of needed memory (worst-case) is 1 Mb (Stage 5 evolution, 16 outputs, 64k truth table outputs) • Maximum longword transfers (worst-case) is 58 (Stage 5 evolution, 2 chromosomes waiting to be evaluated)
Novelties (8) • Chromosome encoding • Chromosomes are made up of route bits and LUT bits • The LUT bits are used to set the appropriate LUT • The route bits are used to decide where the input to a LUT comes from (input variable or previous subfunction) • If a LUT input has been assigned to a previous subfunction, then no input variable can be routed to it • The chromosomes determine how the circuit is mapped and routed, while evolving with each generation • The decoding process takes place in the simulator
Novelties (9) • hcache • Hardware cache stores the solutions of the already-encountered truth tables • With parallelism, hcache will become a common storage facility that any host can use to decide whether to evolve the specific truth table or not • hcache allows for the integration of different structures within the overall system, by a “plug-and-play” feature • Aids in SOC design, by supplying a firm representation of a virtual component (VC) • Provisions for a massively-parallel system
Achievements • The HIGA has been designed, implemented and tested • It has been synthesized to fit on XC4062XLA target • The device drivers as well as the host have been implemented and tested • The communication path between the optimizer and the host is also successfully functioning • Preliminary simulation results have been obtained (see next slide) • A GA was designed and implemented in the C language for future comparison • Speaking of comparison: other GAs and minimization algorithms
Limitations / Obstacles • No system simulations could be presented as our design PC and prototyping platform both have been recently diagnosed with hardware faults • We are working on resolving both issues in order to carry our evolutionary runs (more on this later) • Currently, only 1-16 variable input functions can be processed • Currently, only one input function can be placed on the evolutionary test bed • Currently, the host is simulated in software
Contact Information - Project • Project URL : http://www.site.uottawa.ca/~rabielmo/gas • Tools : • Xilinx Alliance (v3.1) • Cadence NC-VHDL Analyzer • Synopsys VHDL Analyzer, Simulator • Synopsys Design Analyzer • Synopsys Design Checker • Languages : • Java (JDK 1.2.2) • C++ (Visual C++ 6.0, g++ 2.7.2) • VHDL (’87 and ’93) • JNI • Hardware involved: • 2 VCC H.O.T. platforms • 1 PC for design and testing • 1 PC for synthesis • 1 workstation for functional simulation • 1 PC for evolutionary runs and observations
Future Enhancements • The host will be ported (through the XHWIF) to a commercially available FPGA-based hardware • Evolutionary runs will be posted on the project’s URL as they are being processed • A graphical user interface is being designed in order to simplify the internals and clearly present experimental results
Future Work • More than one input function will be able to be processed simultaneously (parallelism) • Functions with more than 16 variables will be able to be processed • GaS aids in the future evolution of complex circuitries • The concept of hcache
Summary • The objectives of this research is to implement minimized solutions of Boolean functions • Simulations will be posted on the URL and in future reports in order to document the proof of concept • GaS has many innovative ideas (LUT and routing evolution, evolutionary stages, hcache…) that allow for the fast and directed evolution of solutions • GaS is the underlying foundation to the evolution of more complex circuitries and drives the shift of design from a structural view to a functional one
Contact Information - Members • Dr. Voicu Groza • SITE • groza@site.uottawa.ca • Research interests: • Distributed computing • Multimedia communication • Virtual Instrumentation • Rami Abielmona • SITE • rabielmo@site.uottawa.ca • Research interests: • Evolvable hardware • VLSI design • Artificial intelligence