Download
1 / 5
50 likes | 176 Views
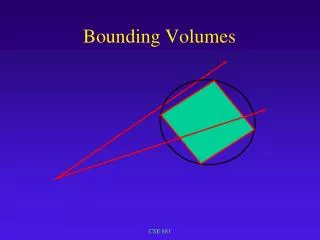
Intersecting a Bounding Sphere. float intersectRaySphere (Ray ray,Sphere sphere) { Vec dst = ray.o - sphere.o ; Real B = dot( dst,ray.d ); Real C = dot( dst,dst ) - sphere.r2; Real D = B*B - C; return D > 0 ? - B - sqrt (D) : std:: numeric_limits <float>::infinity(); }. Quaternions.

E N D
Intersecting a Bounding Sphere • float intersectRaySphere(Ray ray,Sphere sphere) { Vecdst = ray.o - sphere.o; Real B = dot(dst,ray.d); Real C = dot(dst,dst) - sphere.r2; Real D = B*B - C; return D > 0 ? - B - sqrt(D) : std::numeric_limits<float>::infinity(); }
What are Quaternions? • An element of the 4-Dimensional vector-space
Why do you need quaternions? • No Gimbal Lock • They only require 4 numbers, to represent the equiv. of a 3x3 Matrix (9 Numbers) • Angle / Axis conversions are simple • Normalising Quaternions vs. Orthogonalising Matrices • Multiplicative like matrices
What a Quaternion looks like • w + xi + yj + zk (i, j, and k are imaginary numbers)