Download
1 / 12
130 likes | 152 Views
Learn the concepts and techniques of nonparametric clustering and density estimation, including modal structure analysis and recursive algorithms for cluster tree construction. Understand the computational complexity and explore various density estimation methods.

E N D
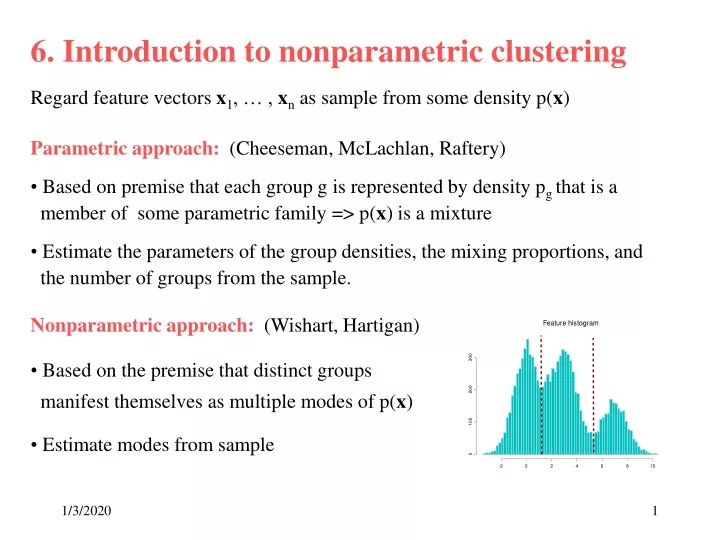
6. Introduction to nonparametric clustering • Regard feature vectors x1, … , xn as sample from some density p(x) • Parametric approach: (Cheeseman, McLachlan, Raftery) • Based on premise that each group g is represented by density pg that is a member of some parametric family => p(x) is a mixture • Estimate the parameters of the group densities, the mixing proportions, and the number of groups from the sample. • Nonparametric approach: (Wishart, Hartigan) • Based on the premise that distinct groups manifest themselves as multiple modes of p(x) • Estimate modes from sample
6.1 Describing the modal structure of a density Consider feature vectors x1 , …. , xn as a sample from some density p(x) . Define level set L(c ; p) as the subset of feature space for which the density p(x) is greater than c. Note: Level sets with multiple connected components indicate multi-modality There might not be a single level set that reveals all the modes
The cluster tree of a density • Modal structure of density is described by cluster tree. • Each node N of cluster tree • represents a subset D(N) of feature space • is associated with a density level c(N) • Root node • represents the entire feature space • is associated with density level c(N) = 0 • Tree defined recursively: to determine descendents of node N • Find lowest level c for which intersection of D(N) with L(c ; p) has two connected components • If there is no such c then N is leaf of tree; leaves of tree <==> modes • Otherwise, create daughter nodes representing the connected components, with associated level c
Goal: Estimate the cluster tree of the underlying density p(x) from the sample feature vectors x1 , …. , xn First step:Estimate p(x) by density estimate p*(x) (see below) Second step:Compute cluster tree of p* (maybe approximately)
6.2 Density estimation Consider feature vectors x1 , …. , xn as a sample from some density p(x). Goal: Estimate p(x) Simplest idea: Let S(x, r) denote a sphere in feature space with radius r, centered at x. Assuming density is roughly constant over S(x, r), the expected number of sample points inS(x, r) is k ~ n * Volume ( S(x, r) ) * p(x), giving p(x) ~ k / (n * Volume ( S(x, r) ) Kernel estimate: Fix radius r ; k = # of sample feature vectors in S(x, r) K-near-neighbor estimate: Fix count k; r = smallest radius for which S(x, r) contains k sample feature vectors Many refinements have been suggested
Example - kernel density estimate in 2-d • Swept under the rug: • Choice of sphere radius r (for kernel estimate) or count k (for near-neighbor estimate) --- critical !! There are automatic methods. • Down-weight observations depending on distance from query point • Adaptive estimation --- vary radius r depending on density • Other types of estimates, etc, etc, etc (extensive literature)
Computational complexity • Computing kernel or near-neighbor estimate at query point x requires finding nearest neighbors of x in sample x1 , …. , xn. • Can find k nearest neighbors of x in time ~ log n using spatial partitioning schemes such as k-d trees, after n log n pre-processing • However • Spatial partitioning most effective if n large relative to d. • Theoretical analysis shows that number of nearest neighbors should increase with n and decrease with dimensionality d: k ~ n ^ (4 / (d + 4)). Relevance ? • In low dimensions (d <= 4) can use histogram or average shifted histogram density estimates based on regular binning. • Evaluation for query point in constant time, after pre-processing ~ n • High dimensionality may present problem
6.3 Recursive algorithms for constructing a cluster tree • For most density estimates p*(x), computing level sets and finding their connected components is a daunting problem --- especially in high dimensions. • Idea: Computesample cluster tree instead • Each node N of sample cluster tree • represents a subset X(N) of the sample • is associated with a density level c(N) • Root node • represents the entire sample • is associated with density level c(N) = 0
To determine descendents of node N • Find lowest level c for which the intersection of X(N) with L(c ; p*) falls into two connected components Note: Intersection of X(N) with L(c ; p*) consists of those feature vectors in the node N for which estimated density p*(xi) > c. @ • If there is no such c then N is leaf of tree; • Otherwise, create daughter nodes representing the “connected components”, with associated level c. • Note: • @ is the critical step. Will in general have to rely on heuristic. • Daughters of a node N do not define a partition of X(N). Assigning low density observations in X(N) to one of the daughters is supervised learning problem
Critical step • Find lowest level c for which observations in X(N) with estimated density p*(xi) > c fall into two connected components of level set L(c ; p*) • Heuristic 1 :(goes with k-near-neighbor density estimate) • Select feature vectors xiin X(N) withp*(xi) > c • Generate graph connecting each feature vector to its k nearest neighbors • Check whether graph has 1 or 2 connected components • Heuristic 2 :(goes with kernel density estimate) • Select feature vectors xiin X(N) withp*(xi) > c • Generate graph connecting feature vectors with distance < r • Check whether graph has 1 or 2 connected components
6.4 Related work / references • Looking for the connected components of a level set --- One-level Mode Analysis --- was first suggested by David Wishart (1969). • Wishart’s paper appeared in obscure place --- Proceedings of the Colloquium in Numerical Taxonomy, St. Andrews, 1968. Nobody in CS cites Wishart. • Idea has been re-invented multiple times --- “sharpening” (Tukey & Tukey); DBSCAN (Ester et al)… Methods differ in heuristics for finding connected components of level set. • Wishart also realized that looking at single level set might not be enough to detect all the modes ==> Hierarchical Mode Analysis. Did not think of it as estimating cluster tree. Algorithm awkward --- based on iterative merging instead of recursive partitioning.OPTICS method of Ankerst et al also considers level sets for different levels.