Download
1 / 7
70 likes | 291 Views
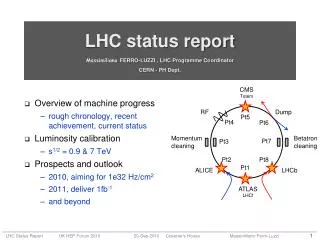
THEMIS – FGM – Status Report. Deliverables, Status FGM Capabilities vs. scientific Requirements Remaining tasks, Commissioning, inflight calibration. Uli Auster and Karl-Heinz Glassmeier, IGEP, TUBS Werner Magnes, IWF, OEAW. Deliverables / Status. Electronics (FGE)

E N D
THEMIS – FGM – Status Report • Deliverables, Status • FGM Capabilities vs. scientific Requirements • Remaining tasks, Commissioning, inflight calibration Uli Auster and Karl-Heinz Glassmeier, IGEP, TUBS Werner Magnes, IWF, OEAW
Deliverables / Status • Electronics (FGE) • Designed at IGEP, MagSon and IWF,manufactured at UCB • Calibrated in Germany /Austria • Delivered to UCB February 2005 • Sensor (FGS) • Designed and manufactured in Germany • Qualified and calibrated in Germany /Austria • Delivered to UCB February 2005 • S/C Integration • Facilities for functional & magnetic tests made available to UCB • Tests after each integration step done by UCB, data evaluation by IGEP at TUBS
FGM capabilities / abs. Stability • Requirement: The absolute stability of the FGM shall be less than 1nT Dependency on sensor temperature: 2nT/170°C
The relative stability of the FGM shall be less than 0.2nT/12h FGM capabilities / rel. Stability Test shows 12 hours registration. Sensor in the ferromagnetic shield of the THEMIS Calibration Unit (TCU) 0.2nT
0.1 0.09 0.08 0.03nT/Hz1/2 0.07 0.06 [nT/Sqrt(Hz)] 0.01nT/Hz1/2 0.05 0.04 0.03 0.02 0.01 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 [Hz] noise FGM capabilities / Noise • The FGM noise level @ 1Hz shall be less than 0.03nT/Hz1/2 Out of 6 sensors 5 sensors and all their components:noise ~0.01nT/Hz1/2 One sensor and one component:noise~0.015nT/Hz1/2 -selected as spare-
The FGM digital resolution shall be less than 0.1nT The FGM science range shall exceed 0-1000nT FGM capabilities / Resolution Test shows Earth field variationsrecorded by two Themis magneto-meters Back ground field: 12000nTResolution: better 0.1nT 1 nT Offset: 1 nT
Remaining tasks • S/C integration • Investigation of Low Telemetry timing problems • Further tests after each integration step • Determination of sensor alignment • Commissioning • FGM has to be switched on first !!!!!! • Measurement during boom deployment !!!!!! • Using small s/c distances after release for initial tests • Inflight calibration • Determination of 8 parameters by minimising spin signal • Determination of 3 parameters by IGRF fit • Determination of spin axis offset by field assumptions