Download
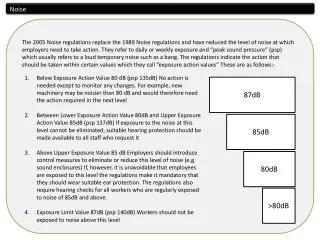
1 / 64
650 likes | 809 Views
Process Noise. R. Hujsak. Topics. The Problem. A scalar state. Scalar process noise. Process noise on rate. Position and rate states. Pos rate & acceleration. Process noise on acceleration. Orbit Errors. Force model process noise. Force model errors. Measurement models.

E N D
Process Noise R. Hujsak
Topics The Problem A scalar state Scalar process noise Process noise on rate Position and rate states Pos rate & acceleration Process noise on acceleration Orbit Errors Forcemodel process noise Force model errors Measurementmodels Meas. model process noise FilterEquations & State Space What “design” make sense? How to simplify analyst’s task? Tips on setting process noise inputs.
How do you model elephants? What happens if the model is not available? This is the scalar state estimation problem
If you solve for a constant “state” FIT PREDICT … then a global least squares fit can be pretty bad.
So you might want to segment the fit PREDICT … and allow the “state” to vary from fit-to-fit. This is better, but still not great.
In the limit a sequential estimate … of the “state” might provide the best possible fit.
X X X X … recognize and reject “bad” data. Any process should • • • •
How to characterize the state? How much can the state change in any step? How rapidly can the state change? Is this a bounded process?
state, white noise = time correlation half-life and standard deviation Choose a process model for a scalar • Exponentially-correlated “stationary” process: • Then the covariance time update is defined by:
What does this process look like? • Generate a random sequence using • Setting = 1 • Pick • Graph sequence
Exponentially correlated process (1 of 3) Sampled at one-second intervals
Exponentially correlated process (2 of 3) Sampled at one-second intervals
Exponentially correlated process (3 of 3) Sampled at one-second intervals Evaluate “process state equation” using random draws from Gaussian distribution
= time correlation constant and standard deviation 1 Choose model values to characterize the process Choose to quantify the speed of change Choose to quantify the magnitude of change
Potential settings to “model” elephants Sampled at one-second intervals
Tuning a scalar random processes • Easy to “tune” if states relate to physical properties • Rate of change in a “quantity” • Amplitude of change in a “quantity” • The exponentially-correlated stationary process is versatile • Characterizes a bounded process • Can be used for other independent variables (elevation) • Is intuitive
You might want to estimate slope to predict position, but slope changes over time You would not want to match the average slope, but model it as random process in slope Suppose the slope is “well behaved” Estimate two states, position and slope, and constrain the correction to the slope with and rate of change with
Position & slope estimation • Assume slope is an exponentially-correlated stationary process (same equations) • All of the error on position is due to random nature of slope • Position does not “wiggle”, unless driven by slope • Define = position, v = slope. The new State becomes:
Position & slope process noise • For arbitrary T and :
In sigma-correlation form : Position & slope process noise • For T << : How would an analyst ever guess the cross correlations?
The quandary for estimation design • Allow analyst to specify and : • Software implements analytic calculation of Q • Require the analyst enter the 2x2 Q directly • But the analyst has to guess the cross-correlations • If the analyst fails to set the cross-correlations correctly • The Q will have to be “retuned” frequently
Singer’s Solution (1970) • Singer used a time-correlated stationary process: = acceleration = time correlation constant and standard deviation T = sampling interval
Singer’s Solution (cont.) • The general state transition function is • But if T << then
Singer’s Solution (cont.) • And Q for T << or in sigma-correlation form: How would an orbit analyst ever guess the cross correlations?
Force model errors we control • Truncate Earth’s gravity model • Use a sphere for body model • When satellite shape and alignment are more complex • Use an impulse (V) for a maneuver • When the real burn has short duration • Use simplified Earth shadow model for eclipsing • Ignore refraction & attenuation of sunlight • Ignore attitude profile All of these errors contribute time-correlated acceleration errors that are bounded
Force model errors out of our control • Variable equipment performance • Thrusters running “hot” or “cold”, ramp up & sputter • Limitations in knowledge • Attitude & alignment knowledge during thrusting • Error in each gravity field coefficient • Unpredictable events • Solar flares • Unknown maneuvers (Space Control problem) • Outgassing • State of the art is limited • Atmospheric density models (error ~ 15%), some are worse • Albedo (actual cloud cover is unknown) These errors also contribute time-correlated acceleration errors that are bounded
Measurement model errors (1 of 3) • Hardware provides unmodeled offsets • Thermal transients • Time-varying biases at facilities and on satellite (transponder) • Alignment changes – stuff wears out • Biases change • Manufacturers do you favors • Convert integrated Doppler counts to range-rate • Convert round trip range to geometric range • Filter raw data and provide filter estimates as measurements These errors might be modeled as time-correlated bias errors that are bounded
Measurement model errors (2 of 3) • Environmental modeling issues • Single frequency systems subject to ionospheric delays • Empirical models have large errors • Tropospheric models • Do not have azimuth dependencies • Facilities do not collect TPH readings • Misuse of calibration data • Use manufacturer’s bench calibration for transponder delay • Instead of solving for the on-orbit delay • Man-in-the-loop • Daily checklist to recalibrate site clocks • Perfectly good setting replaced by a poorer setting • Fat-fingered offsets More bounded time-correlated bias errors
Measurement model errors (3 of 3) • Model choices • Ignore facility locations motion • Tectonic plate motion, tidal uplift & ocean loading • Atmospheric loading • Space based measurements have more issues • Treating tracking platform with a reference ephemeris • Are orbit and attitude errors ignored? Systematic measurement errors are represented by scalar processes
The complete force model • Is expressed in differential equations: (classicalelements used only for purposes of illustration)
Identify model & model error model modelerror
Examine the Kalman Filter (1 of 3) • Given a linear dynamical system with model error • Then state transition is defined by the form: • And the covariance is defined by the expectation:
Kalman Filter (2 of 3) • Define the covariance by taking the expectation Q
Kalman Filter (3 of 3) • Kalman said: IFu() is white E{u()}=0, E{u()u()}=( ,) • And Q is defined by Ricatti Equation
But acceleration errors u(t)are biased and arenot white!So we cannot use Kalman’s zero mean white noise!
Formulation of orbit process noise • IF we can identify the non-white acceleration errors • And IF we can integrate the equations for Q • And IF we can take the expectation • THEN we can define the process noise Q for the error source
UGLY math (1 of 2) • Examine solar pressure on a sphere • Where • S direction along Sun-to-satellite LOS • E direction orthogonal to S and directed along the earth’s velocity vector • N completes r.h.s. S x E = N
UGLY math (2 of 2) • Substitute • Into • And choose an exponentially-correlated process for CR