Download
1 / 1
10 likes | 158 Views
P2.1 ENSEMBLE DATA ASSIMILATION: EXPERIMENTS USING NASA’S GEOS COLUMN PRECIPITATION MODEL D. Zupanski 1 , A. Y. Hou 2 , S. Zhang 2 , M. Zupanski 1 , C. D. Kummerow 1 , and S. H. Cheung 3 1 Colorado State University, Fort Collins, CO 2 NASA Goddard Space Flight Center, Greenbelt, MD

E N D
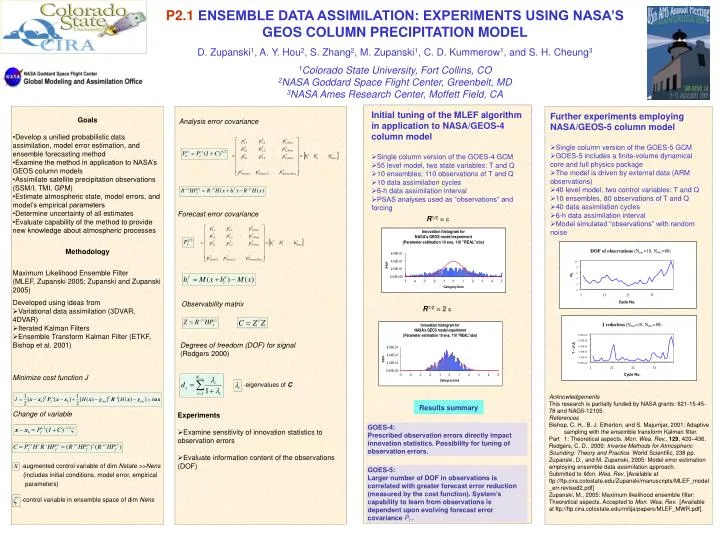
P2.1 ENSEMBLE DATA ASSIMILATION: EXPERIMENTS USING NASA’S GEOS COLUMN PRECIPITATION MODEL D. Zupanski1, A. Y. Hou2, S. Zhang2, M. Zupanski1, C. D. Kummerow1, and S. H. Cheung3 1Colorado State University, Fort Collins, CO 2NASA Goddard Space Flight Center, Greenbelt, MD 3NASA Ames Research Center, Moffett Field, CA • Goals • Develop a unified probabilistic data assimilation, model error estimation, and ensemble forecasting method • Examine the method in application to NASA’s GEOS column models • Assimilate satellite precipitation observations (SSM/I, TMI, GPM) • Estimate atmospheric state, model errors, and model’s empirical parameters • Determine uncertainty of all estimates • Evaluate capability of the method to provide new knowledge about atmospheric processes • Methodology Maximum Likelihood Ensemble Filter (MLEF, Zupanski 2005; Zupanski and Zupanski 2005) • Developed using ideas from • Variational data assimilation(3DVAR, 4DVAR) • Iterated Kalman Filters • Ensemble Transform Kalman Filter (ETKF, Bishop et al. 2001) • Initial tuning of the MLEF algorithm in application to NASA/GEOS-4 column model • Single column version of the GOES-4 GCM • 55 level model, two state variables: T and Q • 10 ensembles, 110 observations of T and Q • 10 data assimilation cycles • 6-h data assimilation interval • PSAS analyses used as “observations” and forcing • Further experiments employing NASA/GEOS-5 column model • Single column version of the GOES-5 GCM • GOES-5 includes a finite-volume dynamical core and full physics package • The model is driven by external data (ARM observations) • 40 level model, two control variables: T and Q • 10 ensembles, 80 observations of T and Q • 40 data assimilation cycles • 6-h data assimilation interval • Model simulated “observations” with random noise Analysis error covariance Forecast error covariance R1/2 =e Observability matrix R1/2 = 2e Degrees of freedom (DOF) for signal (Rodgers 2000) Minimize cost functionJ • eigenvalues of C Acknowledgements This research is partially funded by NASA grants: 621-15-45-78 and NAG5-12105. References Bishop, C. H., B. J. Etherton, and S. Majumjar, 2001: Adaptive sampling with the ensemble transform Kalman filter. Part 1: Theoretical aspects. Mon. Wea. Rev.,129, 420–436. Rodgers, C. D., 2000: Inverse Methods for Atmospheric Sounding: Theory and Practice. World Scientific, 238 pp. Zupanski, D., and M. Zupanski, 2005: Model error estimation employing ensemble data assimilation approach. Submitted to Mon. Wea. Rev. [Available at ftp://ftp.cira.colostate.edu/Zupanski/manuscripts/MLEF_model_err.revised2.pdf] Zupanski, M., 2005: Maximum likelihood ensemble filter: Theoretical aspects. Accepted to Mon. Wea. Rev. [Available at ftp://ftp.cira.colostate.edu/milija/papers/MLEF_MWR.pdf]. Results summary Change of variable • Experiments • Examine sensitivity of innovation statistics to observation errors • Evaluate information content of the observations (DOF) GOES-4: Prescribed observation errors directly impact innovation statistics. Possibility for tuning of observation errors. • augmented control variable of dim Nstate >>Nens • (includes initial conditions, model error, empirical • parameters) GOES-5: Larger number of DOF in observations is correlated with greater forecast error reduction (measured by the cost function). System’s capability to learn from observations is dependent upon evolving forecast error covariance Pf . • control variable in ensemble space of dim Nens