Download
1 / 30
300 likes | 588 Views
Binary Trees . Chapter 6. 6.1 Trees, Binary Trees, and Binary Search Trees . Linked lists usually are more flexible than arrays, but it is difficult to use them to organize a hierarchical representation of objects.

E N D
Binary Trees Chapter 6
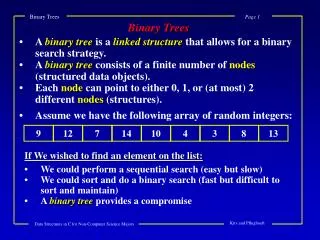
6.1 Trees, Binary Trees, and Binary Search Trees • Linked lists usually are more flexible than arrays, but it is difficult to use them to organize a hierarchical representation of objects. • Stacks and queues reflect some hierarchy but are limited to only one dimension. • For these reasons, create a new data type tree that consists of nodesand arcs/edgesand has the rootat the top and the leaves (terminal nodes) at the bottom. • Tree Representation • Tree generally implemented in the computer using pointers
Tree Terminology / concepts • Path : a unique sequence of arcs or the resulting sequence of nodes. • Root : the node at the top of the tree. (one node / one path) • Leaf : a node that has no children. • Subtree : any node can be considered to be the root of a subtree, which consists of its children, and its children's children, and so on. • Level of the node : • The length of the path from the root to the node. • Level of a node is its distance from the root.
Tree Terminology cont’ • Parent : Any node (except the root) has exactly one edge running upward to another node.. • It has a successor node • Child : Any node can have one or more lines running downward to other nodes. • It has a predecessor node • Siblings :Two or more nodes with the same parent • Ancestor: Any node in the path from the root to the node • Descendent : • Any node in the path below the parent node • All nodes in the paths from a given node to a leaf node
Tree Terminology cont’ • Length : the number of arcs in a path. • Height of non empty tree : the maximum level of a node in the tree. • Is the level of the leaf in the longest path from the root + 1 • The height of an empty tree is -1 • Depth == Height • Visiting : a node is visited when program control arrives at the node, usually for the purpose of carrying out some operation on the node. • Traversing : to visit all the nodes in some specified order. • Key : a value that is used to search for the item or perform other operations on it.
A Root of Subtree I Subtree B B E F C D G H I
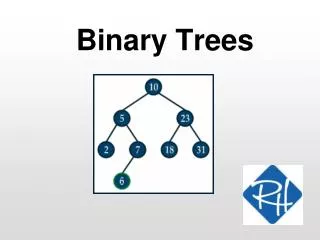
Binary Tree • It is a tree whose nodes have two children (possibly empty), and each child is designed as either a left child or a right child. • If it has 2i nodes at each level i+1, it is called complete binary tree: all nonterminal nodes have both their children and all leaves are at the same level. • The binary search tree : • Also called ordered binary trees • For each node n, all values stored in its left subtree are less than value v stored in n, and all values stored in the right subtree are greater than v.
6.2 Implementing Binary Tree • Why tree / binary tree ? • An ordered array is quick in search using binary search , but it is slow in insertion and deleting nodes • Linked list is quick in insertion and deletion but slow in searching • So, you may use a tree because it combines the advantages of the other two structures: an ordered array and a linked list.
Binary tree can be implemented as : • A linked list. • An Array. • Declare a node as a structure with an information field and two “pointers” fields. • However, it may has problems when deleting and inserting nodes
6.3 Searching a Binary Search Tree • For every node, compare the key to be located with the value stored in the node currently pointed at. • If key is less than the value, go to the left subtree and try again. • If it is greater than that value, try the right subtree. • If it is the same, the search stops. • The search is aborted if there is no way to go – the key is not in the tree.
The complexity of searching is measured by the number of comparisons performed. • This number depends on the number of nodes encountered on the unique path leading from the root to the node being searched for. • So, the complexity is the length of the path leading to this node plus 1. • Complexity depends on • The shape of the tree. • The position of the node in the tree.
Unbalanced Trees • Some of the trees are unbalanced, that is, they have most of their nodes on one side of the root or the other. Individual subtrees may also be unbalanced.
Finding a Node • Finding a node with a specific key is the simplest of the major tree operations. Remember that the nodes in a binary search tree correspond to objects containing information, one of them can be considered as a key.
Efficiency of the Find Operation • How long it takes to find a node depends on how many levels down it is situated. • For example, there can be up to 31 nodes, but no more than 5 levels. Thus you can find any node using a maximum of only 5 comparisons. • This is O(log N) time.
Inserting a Node • Find the place to insert it. This is much the same process as trying to find a node which turns out not to exist. • Follow the path from the root to the appropriate node, which will be the parent of the new node. • After this parent is found, the new node is connected as its left or right child, depending on whether the new node's key is less or greater than that of the parent.
Deleting a Node • Deleting a node is the most complicated common operation required for binary search trees. However, deletion is important in many tree applications. • There are three cases to consider:- 1- The node to be deleted is a leaf node (has no children). 2- The node to be deleted has one child. 3- The node to be deleted has two children.
Case1 : The node to be deleted has no children To delete a leaf node, change the appropriate child field in the node's parent to point to null, instead of to the node.
Case 2 : The node to be deleted has one child The node has only two connections: to its parent and to its only child. You want to "snip" the node out of this sequence by connecting its parent directly to its child.
Case 3 : The node to be deleted has two children If the deleted node has two children, you can't just replace it with one of these children, at least if the child has its own children. • To delete a node with two children, replace the node with its in order successor.
problem correction
Finding Maximum and Minimum values • For the minimum, go to the left child of the root; then go to the left child of that child, and so on, until you come to a node that has no left child. This node is the minimum:
For the maximum value in the tree, follow the same procedure, but go from right child to right child until you find a node with no right child. This node is the maximum.
Summary • Trees consist of nodes (circles) connected by edges (lines). • The root is the topmost node in a tree; it has no parent. • In a binary tree, a node has at most two children. • In a binary search tree, all the nodes that are left descendants of node A have key values less than A; all the nodes that are A’s right descendants have key values greater than (or equal to) A. • Trees perform searches, insertions, and deletions in O(log N) time. • Nodes represent the data-objects being stored in the tree. • Edges are most commonly represented in a program by pointers to a node's children (and sometimes to its parent).
Summary (cont’) • An unbalanced tree is one whose root has many more left descendents than right descendants, or vice versa. • Searching for a node involves comparing the value to be found with the key value of a node, and going to that node's left child if the key search value is less, or to the node’s right child if the search value is greater. • Insertion involves finding the place to insert the new node, and then changing a child data member in its new parent to refer to it.