Download
1 / 1
10 likes | 89 Views
Surface Penetrating Radar Simulations for Europa Thorsten Markus, Laboratory for Hydrospheric Processes NASA/GSFC, Thorsten.Markus@nasa.gov S. Prasad Gogineni, V.C. Ramasami, University of Kansas, Lawrence, KS

E N D
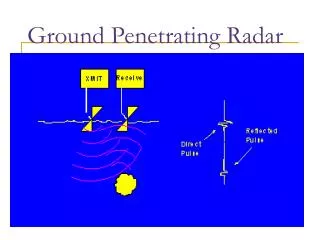
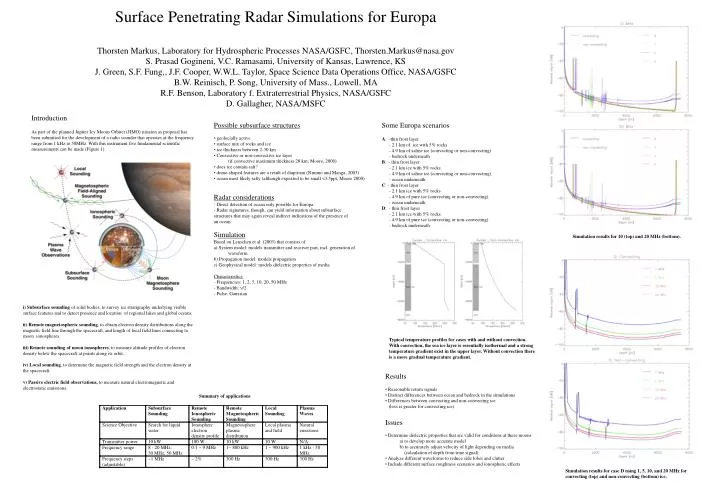
Surface Penetrating Radar Simulations for Europa Thorsten Markus, Laboratory for Hydrospheric Processes NASA/GSFC, Thorsten.Markus@nasa.gov S. Prasad Gogineni, V.C. Ramasami, University of Kansas, Lawrence, KS J. Green, S.F. Fung,, J.F. Cooper, W.W.L. Taylor, Space Science Data Operations Office, NASA/GSFC B.W. Reinisch, P. Song, University of Mass., Lowell, MA R.F. Benson, Laboratory f. Extraterrestrial Physics, NASA/GSFC D. Gallagher, NASA/MSFC Introduction As part of the planned Jupiter Icy Moons Orbiter (JIMO) mission as proposal has been submitted for the development of a radio sounder that operates at the frequency range from 1 kHz to 50MHz. With this instrument five fundamental scientific measurements can be made (Figure 1). • Possible subsurface structures • geolocially active • surface mix of rocks and ice • ice thickness between 2-30 km • Convective or non-convective ice layer • (if convective maximum thickness 20 km; Moore, 2000) • does ice contain salt? • dome-shaped features are a result of diapirism (Nimmo and Manga, 2003) • ocean most likely salty (although expexted to be small <3.5ppt, Moore 2000) • Radar considerations • - Direct detection of ocean only possible for Europa • - Radar signatures, though, can yield information about subsurface • structures that may again reveal indirect indications of the presence of • an ocean • Simulation • Based on Leuschen et al. (2003) that consists of • a) System model: models transmitter and receiver part, incl. generation of • waveform • b) Propagation model: models propagation • c) Geophysical model: models dielectric properties of media • Characteristics: • - Frequencies: 1, 2, 5, 10, 20, 50 MHz • - Bandwidth: n/2 • - Pulse: Gaussian Some Europa scenarios A: -thin frost layer - 2.1 km of ice with 5% rocks - 4.9 km of saline ice (convecting or non-convecting) - bedrock underneath B: - thin frost layer - 2.1 km ice with 5% rocks - 4.9 km of saline ice (convecting or non-convecting) - ocean underneath C: - thin frost layer - 2.1 km ice with 5% rocks - 4.9 km of pure ice (convecting or non-convecting) - ocean underneath D: - thin frost layer - 2.1 km ice with 5% rocks - 4.9 km of pure ice (convecting or non-convecting) - bedrock underneath Simulation results for 10 (top) and 20 MHz (bottom). i) Subsurface sounding of solid bodies, to survey ice stratigraphy underlying visible surface features and to detect presence and location of regional lakes and global oceans. ii) Remote magnetospheric sounding, to obtain electron density distributions along the magnetic field line through the spacecraft, and length of local field lines connecting to moon ionospheres. iii) Remote sounding of moon ionospheres, to measure altitude profiles of electron density below the spacecraft at points along its orbit. iv) Local sounding, to determine the magnetic field strength and the electron density at the spacecraft. v) Passive electric field observations, to measure natural electromagnetic and electrostatic emissions. Typical temperature profiles for cases with and without convection. With convection, the sea ice layer is essentially isothermal and a strong temperature gradient exist in the upper layer. Without convection there is a more gradual temperature gradient. • Results • Reasonable return signals • Distinct differences between ocean and bedrock in the simulations • Differences between convecting and non-convecting ice • (loss is greater for convecting ice) • Issues • Determine dielectric properties that are valid for conditions at these moons • a) to develop more accurate model • b) to accurately adjust velocity of light depending on media • (calculation of depth from time signal) • Analyze different waveforms to reduce side lobes and clutter • Include different surface roughness scenarios and ionospheric effects Summary of applications Simulation results for case D using 1, 5, 10, and 20 MHz for convecting (top) and non-convecting (bottom) ice.