Download
1 / 23
290 likes | 600 Views
Fast Direct GPS Signal Acquisition Using FPGA. Jing Pang Janusz Starzyk. School of Electrical Engineering and Computer Science Ohio University Athens, OH U. S. A. Outline. Direct P-code Acquisition Overview GPS Background GPS signal structure

E N D
Fast Direct GPS Signal Acquisition Using FPGA Jing Pang Janusz Starzyk School of Electrical Engineering and Computer Science Ohio University Athens, OH U. S. A. ECCTD’03
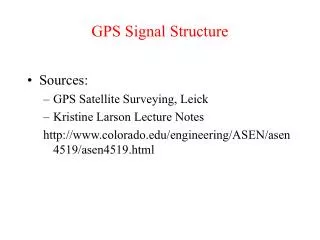
Outline • Direct P-code Acquisition Overview • GPS Background • GPS signal structure • Parallel code phase search for signal acquisition • P-code Generator Architecture • P-code Tuning Model • P-code Property • Noncircular convolution with zero padding • Autocorrelation and acquisition margin • Direct Average Method • Design Platform, Design Flow and Hardware Architecture • Summary ECCTD’03
Direct P-code Acquisition • Time domain acquisition • Massive physical parallel correlators • FFT search • Most of the reported approaches require large size FFT • New approach • Direct average • Small size FFT for FPGA implementation ECCTD’03
/2 L1 carrier C/A code Navigation message P-code L2 carrier GPS Signal Structure Modulo-2 summation Mixer Summation ECCTD’03
GPS Receiver Acquisition ECCTD’03
Parallel Code Phase Search FFT-based Circular Correlator Digital IF Code Generator Y N Carrier Generator peak detected ? more freq. bins ? N Y Failed Acquired Acquisition Result ECCTD’03
Circular Correlator AB* ab a A FFT IFFT b B B* FFT Conjugation ECCTD’03
GPS P-code Generator Short cycle: 4092, 4093 Held after 3749 short cycles 7 Day Reset Extra 37 chips Generate P-code Different satellites ECCTD’03
LFSR X1 And X2 X1B X1A X2B X2A ECCTD’03
Epochs ECCTD’03
P-codes Reset Timing ECCTD’03
P-code Generator Tuning Model z1a: index to the X1A LFSR State at the specified Time x1a: divide-by 3750 counter y1a: z-counter value ECCTD’03
P-code Property • Circular convolution for periodic code • Circular convolution with zero padding ECCTD’03
P-code Property • Each satellite uses unique P-code to implement CDMA technique ECCTD’03
Acquisition Margin • Mean value of acquisition margin: 25.954 • Standard deviation: 1.841 • Each acquisition margin value is obtained over 1 ms ECCTD’03
Direct Average Method • Direct average method is proposed due to the extremely long period of P-code • Direct average over 128 samples autocorrelation result • Summation of correlation results for 15 1-ms windows ECCTD’03
Direct Average Method • Acquisition margin distribution over 1 s. • The mean value of the acquisition margin: 26.882 • The standard variation: 2.676 ECCTD’03
VirtexE FPGA Spartan PCI Interface Design Platform • Nallatech Board PC’s PCI interface ECCTD’03
Xilinx VirtexE Architecture • Overall architecture • One Slice of a CLB • IOB • GRM ECCTD’03
Design Flow Design Entry Functional Simulation Timing Simulation User C++ Application Design Synthesis Nallatech DLL Software Interface Nallatech Custom Hardware Interface Mapping Placement Routing VirtexE chip Bit File ECCTD’03
FPGA Design Partition Average IFFT Processor FFT Processor GPS signal Average Local reference generation unit Local Reference FFT Processor NCO Maximum selection Other control & decision logic Correlation peak & peak location | |2 ECCTD’03
VirtexE FPGA Design Cost 1. NCO 2. P-code generator 3. Average 4. FFT 5. IFFT 6. Complex conjugate multiplication 7. Correlation amplitude square 8. Peak selection and decision logic Total available CLB slices: 15552 Total available Block Rams: 144 ECCTD’03
Summary • Flexible GPS P-code generator tuning model • Produce P-code starting from any time of a GPS week • Direct Average Method • Improve acquisition speed • Simplify FPGA hardware design • Hardware FPGA implementation ECCTD’03