Download
1 / 25
250 likes | 431 Views
The homework. Pay attention to the symbols of the links and kinematic pairing Label out the primary drive Pay attention to the scale of your sketch For the collinear pairing, use the center line to present them out. For the system, you must analyze the functions of the machine. The homework.

E N D
The homework • Pay attention to the symbols of the links and kinematic pairing • Label out the primary drive • Pay attention to the scale of your sketch • For the collinear pairing, use the center line to present them out. • For the system, you must analyze the functions of the machine.
The homework • Label out the link and pairing with different Number series • Pay attention to the redundant constraint • Pay attention to the compound hinges • Compare it with the real model.
Summary of QAs • 共同约束=公共约束 • 杆组的主要应用是机构的机械分析 • 机构自由度的计算公式通用化问题 • 答疑问题需要大家积极参加!!! • 欢迎大家给我的TA与我发送电子邮件! • 课代表整理出班机的电子邮件发送给我们!
Summary of last class 1) General Character of a four-bar linkage 2) Basic Form of Four-bar Linakage 3) Grashof Criterion (Conditions of a Crank) 4) Inversions of Four-bar Linkage 5) Kinematic Design of Four-bar Linkage
Today’s Main Topic • General task of kinematic analysis • 1. Velocity Analysis of four bar linkage with graphic method • 2. The Velocity Analysis of Four-bar linkage with Computer program
Velocity Analysis of four bar linkage with graphic method • 1.1 Aronhold-Kennedy Theorem • 1.2 Apply the Instant center to basic four bar linkage • 1.3 Apply the instant center to slide crank mechanism • 1.4 The general method of application • 1.5 Shortcomings of the graphic method
1.1 Aronhold-Kennedy Theorem Definition of Instant Center Two bodies moves in a planar motion, there is two coincident points, the absolute velocities of which are the same At the instant, the pair of coincident points with the same velocities is defined as the instantaneous center of relative motion
1.1 Aronhold-Kennedy Theorem Character of Instant center 1) Two body with relative motion 2) The instant center may be changing all the time 3) The Velocity Vector is perpendicular to the rotating radius 3) If one link is a frame, the instant center is the rotating center
1.1 Aronhold-Kennedy Theorem Number of instant centers of a Mechanism Two links have one instant center Three links have 3 instant centers Four links C24 n links will have Cn2
1.1 Aronhold-Kennedy Theorem • Location of the Instant Center of two links connected by a Kinematic pair • 1) Revolute pair • 2) Pure rolling pair • 3) Sliding pair • 4) higher pairing • Textbook pp 56
1.1 Aronhold-Kennedy Theorem • The Theorem: Any three links have three instant centers, the three instant centers must lie on a straight line Proof Use the contradiction method Pp 57
1.2 Apply the Instant center to basic four bar linkage • Pp57 • Given the crank rotating velocity w2 • The links length and the position • Find the rotating speed of w3 and w4 • W4= w3* p12p24/p14p24
1.3 Apply the instant center to slide crank mechanism Given the dimension of the links, the position of the links and the rotating speed of crank. Find out the sliding speed of the slider. V4=Vp24=w2* p12p24
1.4 The general method of application Given the dimension of the links and angular velocity of crank one. Find out the rotating speed of rocker three Find out the speed of point F on coupler two
1.5 Shortcomings of the graphic method 1)Each position should have a analysis, For the whole procedure need much work 2) The instant center may be far away from the drawing paper 3) Some instant center is not easy to find out 4) Can use the vector method 5) Analytical method may be easy to use.
Velocity Analysis of four bar linkage with graphic method • 1.1 Aronhold-Kennedy Theorem • 1.2 Apply the Instant center to basic four bar linkage • 1.3 Apply the instant center to slide crank mechanism • 1.4 The general method of application • 1.5 Shortcomings of the graphic method
2. The Velocity Analysis of Four-bar linkage with Computer program The slide crank mechanism
2. The Velocity Analysis of Four-bar linkage with Computer program The basic form of four bar linkage L2 L3 phi2 L1 phi1 L4
2. The Velocity Analysis of Four-bar linkage with Computer program The more general method of Kinematic Analysis is the Assur group method Find out the basic Component of the linkage system. The program out the basic subroutine. You just call them when you want to Calculate
2. The Velocity Analysis of Four-bar linkage with Computer program The basic Dyad RPR RRP RRR
2. The Velocity Analysis of Four-bar linkage with Computer program Basic Kinematic Analysis Position Analysis Velocity Analysis Acceleration Analysis See Textbook pp59
2. The Velocity Analysis of Four-bar linkage with Computer program Given The position of link A and Link B The angular velocity of point A, B Find out the angular velocity of link B and velocity of point C LB LA C B A
2. The Velocity Analysis of Four-bar linkage with Computer program The PRP dyad Given: the Position and Angular parameters of Point A and Point C Find out the kinematic parameters of the Guide bar See pp 35 of the reference book
What have we dealt with today • General tasks and methods of kinematic analysis • 1. Velocity Analysis of four bar linkage with graphic method • 2. The Velocity Analysis of Four-bar linkage with Computer program
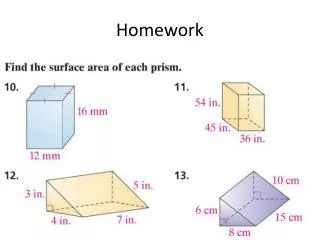
Homework for Today Textbook pp 40 1) 2.8 be abide by the ratio of the links if you draw the kinematic sketch by hand. 2) 2.11 the crank has an angle with line AC for 30 degrees.