Download
1 / 50
1.47k likes | 2.82k Views
MSCS6060 Parallel and Distributed Systems. Lecture 1 Introduction. Goal of the Course. We study architectures, algorithms, and programming paradigm for parallel and distributed systems.

E N D
MSCS6060 Parallel and Distributed Systems Lecture 1 Introduction
Goal of the Course We study architectures, algorithms, and programming paradigm for parallel and distributed systems. “A distributed system consists of a collection of autonomous computers linked to a computer network and equipped with distributed system software.” “Distributed systems is a term used to define a wide range of computer systems from a weakly-coupled system such as wide area networks, to very strongly coupled systems such as multiprocessor systems.”
Parallel vs. Distributed System Within the context of concurrent computing of a single job, which takes a long time or is infeasible on one processor • strongly-coupled example: multiprocessor systems • Multiple processors, each with its own cache • Data exchange through shared memory among processors • Single operating system • loose-coupled example: Google data center • Multiple, independent workstations • Connected by networks
Parallel Computing A single job is concurrently executed by multiple processors for shorter time-to-solution. The system might be • A single workstation with a multi-core processor • Each core executes parts of the job • Data exchange through shared memory • A cluster of computers connected by high speed network • All cores in the cluster participates in execution • Data exchange through message passing across network
Distributed Computing Within the context where concurrency is not usually required for a single job. • Peer-to-peer (P2P) computing systems • Participants that make a portion of their resources directly available to other network participants • Example: Napster • Mobile computing network • Distributed transactions
Administrative Issues • Timing: • Class: TTH 5:00-6:15PM • Office Hours: TTH 10:30AM-12:00PM at CU320 or by appointment • Course website • http://www.mscs.mu.edu/~rge/mscs6060 • Textbook: • An Introduction to Parallel Computing (Ed. 2) by AnanthGrama et al • Designing and Building Parallel Programs (Online) by Ian Foster. • Exams • Midterm: Oct 18 • Take home final: 5/13/2010, Tuesday
Administrative Issues II • Grading • Reading -- 10% • Programming assignment -- 25% • Term projects -- 25% • Midterm exam I -- 20% • Final exam -- 20% • Late assignment • each student is allowed to submit one of his assignments/projects within 48-hours of due time. All other assignments and projects must be submitted in time. • Course policies
About Myself • Name: Rong Ge • PhD from Virginia Tech • Research areas: • Parallel and distributed systems • High performance computing • Energy-efficient computing • Performance analysis and evaluation
Today’s Lecture • Big picture • Why do we build parallel and distributed systems?
Non Parallel Distributed Systems terminal terminal A sequential system Not parallel terminal Server The server machine: a high-performance host, running one or more server programs which share its resources with clients. The clients do not share any of their resources, but requests a server's content or service function terminal
Parallel System Are Ubiquitous Today • Processors ranging from high end in servers to low power in mobiles systems • CMP technology with multiple cores • High end server processors Xeon and Opteron • Quad-core or six-core processors • Atom processors in netbooks • Dual-core • Processors in cell phones • Dual-core
A Distributed System with MultipleServers Server Server Server Server Server
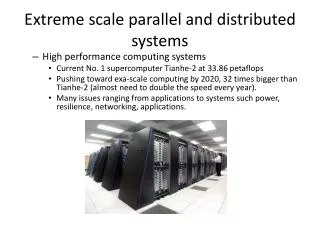
Traditional Uses • Numerical simulations of complex systems and "Grand Challenge Problems" such as: • weather and climate • chemical and nuclear reactions • biological, human genome • geological, seismic activity • mechanical devices - from prosthetics to spacecraft • electronic circuits • manufacturing processes
Emerging use • Amazon • Google • Airline reservation systems • Finance: e-transactions, e-banking, stock-exchange • Military • Advanced graphics and Virtual reality • Networked video and multi-media technologies
Why Parallel and Distributed Systems • Computational speedup • Some tasks too large for even the fastest single computer • Real time weather/climate modeling, human genome project, fluid turbulence modeling, etc • Resource sharing • Distributed systems offer access to specialized resources of many systems • Some nodes may have special databases/info • Some nodes may have access to special hardware • Reliability and availability • Redundancy, fail over
Why not distributed systems? What are the disadvantages? Parallel vs sequential? distributed vs centralized? multi-server vs client-server? • Expensive (to have high computation power and redundancy) • Complexity, maintenance cost • Concurrency => Interleaving => Bugs • Failures lead to incorrectness.
The Scope of This Course • System architectures • Parallel computing paradigm • Posix Multithreaded • OpenMP • Message passing • UPC if time allows • Heterogeneous programming • Parallel algorithm design and analysis • Distributed system design technology • Google File system • HadoopMapReduce • Amazon storage systems • Peer to peer computing • Cloud computing
Summary • What is parallel and distributed systems • What are they good for?
5 components of any Computer Keyboard, Mouse Computer Processor (active) Memory (passive) (where programs, data live when running) Devices Disk(where programs, data live when not running) Input Control (“brain”) Datapath (“brawn”) Output Display, Printer
Levels of Abstraction for a Computer Applications Operating Compiler System Software Assembler Instruction Set Architecture Hardware Processor Memory I/O system OS manages resources OS manages resources and schedule processes
History of Computing Systems • Phase 1: hardware is expensive, humans are cheap • User at console: single-user systems • Batching systems (1955-1965) • Multiprogramming systems (1965-1980) • Phase 2: hardware is cheap, humans are expensive • Time sharing: users use cheap terminal and share servers • Phase 3: hardware is very cheap, humans are very expensive • Personal computing: one system per user • Distributed computing: lots of systems per user
Multiprogramming • Multiple sequential processes in a run state can be swapped in and out by the OS • Run state: the executable file and data are held in memory • Better utilization of CPU • High throughput • Short timespan for a single program • IO interrupt • While I/O is in progress for program P1, the computer will execute several thousand instructions of program P2 and return to process the data obtained for P1 when it is ready or when P2 is waiting on I/O • Time sharing • The execution of program P1 will be interrupted by time too
Process • A process is an abstraction that supports running programs • A process is the basic unit of execution in an operating system • Different processes may run several instances of the same program • At a minimum, process execution requires • Memory to contain the program file and data • A set of CPU registers to support execution
Anatomy of a Process • Executable file • Header • Code • Initialized data • Process’s address space • Process control block
Costs of Concurrency Transparency • Independent processes cannot maliciously or inadvertently affect the correctness of each other’s behaviors. • Cost of concurrency transparency • Creation: OS must create a complete independent address space • Initialize memory segments • Copy the associated program into a text segment • Set up a stack for temporary data • Switching: • Save the CPU context (register values, program counter, stack pointer, …) • Modify registers of the MMU • Invalidate address translation caches • Swap processes between main memory and disk
Threads vs. Processes Thread • A thread has no data segment or heap • A thread cannot live on its own, it must live within a process • There can be more than one thread in a process, the first thread calls main and has the process’s stack • Inexpensive creation • Inexpensive context switching • If a thread dies, its stack is reclaimed by the process Processes • A process has code/data/heap and other segments • There must be at least one thread in a process • Threads within a process share code/data/heap, share I/O, but each has its own stack and registers • Expense creation • Expensive context switching • It a process dies, its resources are reclaimed and all threads die
Thread Implementation • Process defines address space • Threads share address space • Process Control Block (PCB) contains process-specific info • PID, owner, heap pointer, active threads and pointers to thread info • Thread Control Block (TCB) contains thread-specific info • Stack pointer, PC, thread state, register … TCB for thread1 Process’s address space $pc $sp State Registers … … Reserved DLL’s Stack – thread 1 TCB for thread2 Stack – thread 2 $pc $sp State Registers … … Heap Initialized data CODE
Benefits of Threading • Responsiveness • When one thread is blocked, your browser still responds • E.g. download images while allowing your interaction • Resource Sharing • Share the same address space • Reduce overhead (e.g. memory) • Economy • Creating a new process costs memory and resources • E.g. in Solaris, 30 times slower in creating process than thread • Utilization of MP Architectures • Threads can be executed in parallel on multiple processors • Increase concurrency and throughput
Examples of Threads • A web browser • One thread displays images • One thread retrieves data from network • A word processor • One thread displays graphics • One thread reads keystrokes • One thread performs spell checking in the background • A web server • One thread accepts requests • When a request comes in, separate thread is created to service • Many threads to support thousands of client requests
What does the developer have to do? • Decide how to decompose the computation into parallel parts. • Create and destroy threads to support the decomposition • Add synchronization to make sure dependences are covered.
What’s POSIX Got To Do With It? • Each OS had it’s own thread library and style • That made writing multithreaded programs difficult because: • you had to learn a new API with each new OS • you had to modify your code with each port to a new OS • POSIX (IEEE 1003.1c-1995) provided a standard known as Pthreads
Pthreads: A shared memory programming model • POSIX standard shared memory multithreading interface. • Not just for parallel programming, but for general multithreaded programming • Provide primitives for thread management and synchronization. • Threads are commonly associated with shared memory architectures and operating systems. • Necessary for unleashing the computing power of SMT and CMP processors. • Making it easy and efficient is very important at this time.
Pthreads: execution model • A single process can have multiple, concurrent execution paths. • a.out creates a number of threads that can be scheduled and run concurrently. • Each thread has local data, but also, shares the entire resources (global data) of a.out. • Any thread can execute any subroutine at the same time as other threads. • Threads communicate through global memory.
Summary • Process vs. thread • Multiprogramming vs. multhreading
Pthreads: POSIX Threads • Pthreads is a standard set of C library functions for multithreaded programming • IEEE Portable Operating System Interface, POSIX, section 1003.1 standard, 1995 • Pthread Library (60+ functions) • Thread management: create, exit, detach, join, . . . • Thread cancellation • Mutex locks: init, destroy, lock, unlock, . . . • Condition variables: init, destroy, wait, timed wait, . . . • . . . • Programs must include the file pthread.h • Programs must be linked with the pthread library (-lpthread)
Pthreads Naming Convention • Types: pthread[_object]_t • Functions: pthread[_object]_action • Constants/Macros: PTHREAD_PURPOSE • Examples: • pthread_t: the type of a thread • pthread_create(): creates a thread • pthread_mutex_t: the type of a mutex lock • pthread_mutex_lock(): lock a mutex
pthread_create() • Creates a new thread intpthread_create ( pthread_t *thread, pthread_attr_t *attr, void * (*start_routine) (void *), void *arg); • Returns 0 to indicate success, otherwise returns error code • thread: output argument for the id of the new thread • attr: input argument that specifies the attributes of the thread to be created (NULL = default attributes) • start_routine: function to use as the start of the new thread • must have prototype: void * foo(void*) • arg: argument to pass to the new thread routine • If the thread routine requires multiple arguments, they must be passed bundled up in an array or a structure
pthread_create() example • Want to create a thread to compute the sum of the elements of an array void *do_work(void *arg); • Needs three arguments • the array, its size, where to store the sum • we need to bundle them in a structure struct arguments { double *array; int size; double *sum; }
pthread_create() example int main(intargc, char *argv) { double array[100]; double sum; pthread_tworker_thread; struct arguments *arg; arg = (struct arguments *)calloc(1, sizeof(struct arguments)); arg->array = array; arg->size=100; arg->sum = ∑ if (pthread_create(&worker_thread, NULL, do_work, (void *)arg)) { fprintf(stderr,”Error while creating thread\n”); exit(1); } ... }
pthread_create() example void *do_work(void *arg) { struct arguments *argument; inti, size; double *array; double *sum; argument = (struct arguments*)arg; size = argument->size; array = argument->array; sum = argument->sum; *sum = 0; for (i=0;i<size;i++) *sum += array[i]; return NULL; }
Comments about the example • The “main thread” continues its normal execution after creating the “child thread” • IMPORTANT: If the main thread terminates, then all threads are killed! • We will see that there is a join() function • Of course, memory is shared by the parent and the child (the array, the location of the sum) • nothing prevents the parent from doing something to it while the child is still executing • which may lead to a wrong computation • we will see that Pthreads provide locking mechanisms • The bundling and unbundling of arguments is a bit tedious
pthread_exit() • Terminates the calling thread void pthread_exit(void *retval); • The return value is made available to another thread calling a pthread_join()(introduced later) • My previous example had the thread just return from function do_work() • In this case the call to pthread_exit() is implicit • The return value of the function serves as the argument to the (implicitly called) pthread_exit().