Download
1 / 45
450 likes | 586 Views
Counting Crowded Moving Objects. Vincent Rabaud and Serge Belongie Department of Computer Science and Engineering University of California, San Diego { vrabaud,sjb }@ cs.ucsd.edu. Presentation by: Yaron Koral IDC, Herzlia , ISRAEL. AGENDA. Motivation Challenges Algorithm

E N D
Counting Crowded Moving Objects Vincent Rabaud and Serge Belongie Department of Computer Science and Engineering University of California, San Diego {vrabaud,sjb}@cs.ucsd.edu Presentation by: Yaron Koral IDC, Herzlia, ISRAEL
AGENDA • Motivation • Challenges • Algorithm • Experimental Results
AGENDA • Motivation • Challenges • Algorithm • Experimental Results
Motivation • Counting crowds of people • Counting herds of animals • Counting migrating cells • Everything goes as long as the crowdis homogeneous!!
AGENDA • Motivation • Challenges • Algorithm • Experimental Results
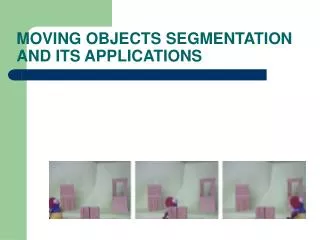
Challenges • The problem of occlusion • Inter-object • Self occlusion • Large number of independent motions • Dozens of erratically moving objects • Require more than two successive frames Surveillance camera viewing a crowd from a distant viewpoint, but zoomed in, such that the effects of perspective are minimized.
AGENDA • Motivation • Challenges • Algorithm • Experimental Results
Algorithm Highlights • Feature Tracking with KLT • Increased Efficiency • Feature Re-Spawning • Trajectory Conditioning • Trajectory Clustering
Algorithm Highlights • Feature Tracking with KLT • Increased Efficiency • Feature Re-Spawning • Trajectory Conditioning • Trajectory Clustering
Harris Corner Detector – What are Good Features?C.Harris, M.Stephens. “A Combined Corner and Edge Detector”. 1988 • We should easily recognize a corner by looking through a small window • Shifting a window in anydirection should give a large change in intensity
Harris Detector: Basic Idea “flat” region:no change in all directions “edge”:no change along the edge direction “corner”:significant change in all directions
Window function Shifted intensity Intensity Window function w(x,y) = or 1 in window, 0 outside Gaussian Harris Detector: Mathematics Change of intensity for shift in [u,v] direction:
Harris Detector: Mathematics For small [u,v]: We have:
Harris Detector: Mathematics For small shifts [u,v] we have a bilinear approximation: where M is a 22 matrix computed from image derivatives:
Harris Detector: Mathematics Denotes by ei the ith eigen-vactor of M whose eigen-value is i: Conclusions:
Harris Detector: Mathematics Intensity change in shifting window: eigenvalue analysis 1, 2 – eigenvalues of M direction of the fastest change Ellipse E(u,v) = const direction of the slowest change (max)-1/2 (min)-1/2
Harris Detector: Mathematics 2 Classification of image points using eigenvalues of M: “Edge” 2 >> 1 “Corner”1 and 2 are large,1 ~ 2;E increases in all directions 1 and 2 are small;E is almost constant in all directions “Edge” 1 >> 2 “Flat” region 1
Sum of Squared Differences – Tracking Features • SSD is optimal in the sense of ML when • Constant brightness assumption • i.i.d. additive Gaussian noise
Exhaustive Search • Loop over all parameter space • No realistic in most cases • Computationally expensive • E.g. to search 100X100 image in 1000X1000 image using only translation ~1010 operations! • Explodes with number of parameters • Precision limited to step size
The Problem Find (u,v) that minimizes the SSD over region A. Assume that (u,v) are constant over all A
Iterative Solution • Lucas Kanade (1981) • Use Taylor expansion of I (the optical flow equation) • Find
Feature Tracking with KLT(We’re back to crowd counting…) • KLT is a feature tracking algorithm • Driving Principle: • Determine the motion parameter oflocal window W from image I to consecutive image J • The center of the window defines the tracked feature
Feature Tracking with KLT • Given a window W • the affine motion parameters A and d are chosen to minimize the dissimilarity Affine Motion = Monitoring
Feature Tracking with KLT • It is assumed that only d matters between 2 frames. Therefore a variation of SSD is used Pure Translation -> Tracking min(λ1,λ2) > t • A window is accepted as a candidate feature if in the center of the window, both eigenvalues exceed a predefined threshold t
Algorithm Highlights • Feature Tracking with KLT • Increased Efficiency • Feature Re-Spawning • Trajectory Conditioning • Trajectory Clustering
Increased Efficiency #1 • Associating only one window with each feature • Giving a uniform weight function that depends on 1/(window area |w|) • Determining quality by comparing: • Computation of different Z matrices is accelerated by “integral image”[1] [1] Viola & Jones 2004
Increased Efficiency #2 • Run on sample training frames first • Determine parameters that lead to the optimal windows sizes • Reduces to less than 5% of the possible parameter set • All objects are from the same class Surveillance camera viewing a crowd from a distant viewpoint, but zoomed in, such that the effects of perspective are minimized.
Algorithm Highlights • Feature Tracking with KLT • Increased Efficiency • Feature Re-Spawning • Trajectory Conditioning • Trajectory Clustering
Feature Re-Spawning • Along time, KLT looses track: • Inter-object occlusion • Self occlusion • Exit from picture • Appearance change due to perspective and articulation • KLT recreates features all the time • Computationally intensive • Weak features are renewed
Feature Re-Spawning • Re-Spawn features only at specific locations in space and time • Propagate them forward and backward in time • Find the biggest “holes” • Re-spawn featuresin frame with theweighted average oftimes
Algorithm Highlights • Feature Tracking with KLT • Increased Efficiency • Feature Re-Spawning • Trajectory Conditioning • Trajectory Clustering
Trajectory Conditioning • KLT tracker gives a set of trajectories with poor homogeneity • Don’t begin and end at the same times • Occlusions can result in trajectory fragmentation • Feature can lose its strength resulting in less precise tracks • Solution: condition the data • Spatially and temporally
Trajectory Conditioning • Each trajectory is influenced by its spatial neighbors • Apply a box to each raw trajectory • Follow all neighbor trajectories from the time the trajectory started
Algorithm Highlights • Feature Tracking with KLT • Increased Efficiency • Feature Re-Spawning • Trajectory Conditioning • Trajectory Clustering
Trajectory Clustering • Determine number of object at time t by clustering trajectories • Since at time t objects may be close, focus attention on a time interval (half-width of 200 frames) • Build connectivity graph • At each time step, the present features form the nodes of a connectivity graph G • Edges indicate possible membership to a common object.
Surveillance camera viewing a crowd from a distant viewpoint, but zoomed in, such that the effects of perspective are minimized. Trajectory Clustering • Connectivity Graph • Bounding Box: as small as possible, able to contain every possible instance of the object • If two features do not stay in a certain box, they do not belong to the same object. • The 3 parameters of this box are learned from training data. Articulation factor
Trajectory Clustering • Rigid parts merging • Features share similar movement during whole life span, belong to a rigid part of an object, and consequently to a common object • RANSAC is applied to sets of trajectories • Within time window • Connected in graph G
Trajectory Clustering • Agglomerative Clustering • At each iteration, the two closest sets are considered • If all features are linked to each other in the connectivity graph, they are merged together. • Otherwise, the next closest sets are considered • Proceed until all possible pairs are analyzed
AGENDA • Motivation • Challenges • Algorithm • Experimental Results
Experimental results • Datasets • USC: elevated view of a crowd consisting of zero to twelve persons • LIBRARY: elevated view of a crowd of twenty to fifty persons • CELLS: red blood cell dataset consisting of fifty to hundred blood cells
Experimental results Estimated Ground Truth
Conclusion • A new way for segmenting motions generated by multiple objects in crowd • Enhancements to KLT tracker • Conditioning and Clustering techniques