Download
1 / 59
600 likes | 755 Views
RAV Remote Aquatic Vehicle. Group Members: Matthew Allgeier Kevin DiFalco Dan Hunt Derrick Maestas Steve Nauman Jaclyn Poon Aaron Shileikis. Overview. Objectives Overall Vehicle Design Hydrodynamics Buoyancy Propulsion Low Speed Maneuverability Communications Electronics

E N D
RAVRemote Aquatic Vehicle Group Members: Matthew Allgeier Kevin DiFalco Dan Hunt Derrick Maestas Steve Nauman Jaclyn Poon Aaron Shileikis
Overview • Objectives • Overall Vehicle Design • Hydrodynamics • Buoyancy • Propulsion • Low Speed Maneuverability • Communications • Electronics • Conclusion • References • Supplemental Information ASEN 4018
Objectives • Mission Statement • Conceive, Design, Fabricate, Integrate, Test and Verify a Remote Aquatic Vehicle (RAV) with active buoyancy and low speed maneuverability that is deployable by a single person. • Mission Goals • Velocity = 7 knots • Rotation Rate = 1 rev/min • Max Depth = 20m • Weight = 130 N ASEN 4018
Overall Vehicle Design • Configuration Alpha • 4 aft movable control surfaces • Shroud is optional • Configuration Bravo • 2 dive planes located in bow • 1 aft rudder (not shown) • Shroud required ASEN 4018
Overall Vehicle Design • Components: • Vehicle Structure – torpedo shaped, compartmentalized • Buoyancy – 2 piston cylinder tanks, 1 fore, 1 aft • Motor – DC electric, reversible, located in tail section • Low Speed Maneuverability (LSM) – 4 vortex jets, 2 fore, 2 aft • Electronics – actuators, multiple onboard sensors, data storage • Communications – radio control ASEN 4018
Hydrodynamics • Design Alternatives • CU: HydroBuff • Myring Hull Contour • Three Section Layout • Two Dive Planes, Four Stabilizers, One Rudder, and Propeller Shroud • Florida Atlantic: SQUID II • Laminar Torpedo Shape Design • Vector Thrusting with Propeller Shroud and Four Stabilizers [3] ASEN 4018
MIT: The Orca 2 • Torpedo Shape • Side, Aft, and Bow Mounted Thrusters • Cornell: CUAV • Cylinder Shaped Hull • Side, Aft, and Bow Mounted Thrusters [3] ASEN 4018
Design Alternatives ASEN 4018
Design-To Specifications • Increase maximum forward velocity to 5-7 knots (HydroBuff achieved about 3 knots) • Be able to manufacture all structural components in-house. • Decrease overall size of submarine. • Increase ability to withstand compressive forces. • Increase structural mass so that extra weights are not required ASEN 4018
Design To Specifications • Myring Hull Contour • Decided to again use a Myring Hull Contour • Efficient mathematical model that minimizes drag for submersible objects. • Ease of repeatability • Proven success, therefore low risk. • Other designs considered include a Torpedo shape and a Rectangular Shape [5] ASEN 4018
Design Issues and Risk • Issues • Duplication of Myring Hull contour design provides very low risk due to proven success. • Machining all products in-house eliminates dependency on outside companies. • Risks • Decreasing size of submarine induces a slight risk on interior components (electronics, batteries, ect..) not fitting. ASEN 4018
Buoyancy • Design Alternatives • Piston Ballast Tank • Pressure Ballast Tank • Vented Ballast Tank • Flexible Ballast Tank • Membrane Ballast Tank • Bellow Ballast Tank • Gas Operated Ballast Tank ASEN 4018
Design Alternatives ASEN 4018
Buoyancy Design Tree ASEN 4018
Design To Specifications • Buoyant Force: ρgV • Volume: Cylinder - L = 600 mm - D = 150 mm Nose Cone - L = 180 mm Tail Cone - L = 270 mm • Buoyant Force = 130.01 N (29.23 lbf) ASEN 4018
Design To Specifications • Max Empty Weight of Submarine must be less than 130 N (29.23 lbf) • Smallest Volume of Buoyancy Tank: 100 mL • Positive Buoyancy of 0.7 % (~1 N Net Force) • Negative Buoyancy of 0.7 % (~1 N Net Force) • Neutral Buoyancy at 50 mL • Increasing Tank Size increases Negative Buoyancy • Pressure Force on Piston at 20 m depth: ~5.4 kN with diameter of 150 mm • Increasing diameter increases pressure force on piston ASEN 4018
Design Issues and Risks • Issues: • Testing Facility for 20 m to 0 m still being investigated • System performance not dependant on depth except for motor strength • Very dependent on weight and volume • If weight is increased volume must increase to provide positive buoyancy • Tank Diameter • Determines Mass Flow Rate and Pressure Force on Piston • Risk: • Sealing critical to design • Piston friction requires seal selection to be important design driver for diameter and piston speed • Safety ASEN 4018
Design Alternatives Propulsion ASEN 4018
Design To Specifications • Requirements • Motor – accelerate to 10 knots. • Propeller – pitch and diameter • Batteries – Provide power to motor for 1 hour of cruise • Shroud • Overall Design • Single propeller in rear of vehicle • Powered by 6-24 Volts • 600-1000 RPM’s per Volt • 50-150 mm propeller diameter • 50-200 mm propeller pitch ASEN 4018
Design To Specification • Motor Power Needed: ~500 W • Calculated on a set velocity and drag • Plot shows relationship between pitch, RPM, and Motor Power ASEN 4018
Design To Specification ASEN 4018
Design Issues and Risks • Issues: • Propeller – manufacturing is very difficult and finding the required prop may be difficult. • Propeller may have to be manufactured in house • Quantitative analysis of shroud is in progress • May have difficulty providing a motor with 24 volts for 1 hour of cruise time • Risks: • Propeller slippage in the water may occur if torque calculations are not correct • Safety ASEN 4018
Low Speed Maneuverability • Design Alternatives • Synthetic Vortex Jets • External Thrusters • Internal Thrusters • Water Displacement System - pumps • Gyros ASEN 4018
Design Alternatives ASEN 4018
Strafe Rotate • Design To Specifications • Vortex Jets • Low Drag • Minimal Space Required • Easy to Manufacture • Electronically complex • Inexpensive • New Concept [2] ASEN 4018
Design To Specifications • Vortex Jets • Length / Diameter = 4 • Zero-mass change • Solenoid selection • Soft shift • Tubular • Low profile • Open frame ASEN 4018
Design To Specifications • Internal • Compact • Low Cost • Required Force > 0.2 N • 150 mm diameter, 1 m length vehicle to rotate 1rev/min • D=1/2 * ρ V2 d L Cd = .2093 N • Conservative calculation • Modeled with all forces experienced at the end of vehicle ASEN 4018
Design Issues and Risks • Issues: • Optimization required for RAV • Latex diaphragm • Frequency of jet oscillations • Duty cycle of solenoids • Exit-hole diameter • Solenoid or piezo-electric disk • Latex slippage • Latex attachment to solenoid • Watertight • Risks: • Corrosion • Not a proven concept • Watertight ASEN 4018
Communication • Design Alternatives • Radio Control • Sonar • Wire • Light ASEN 4018
Design to Specifications • Programmable Controller(s) • # of Channels dependent on # of Actuators • 9 Channel Limit/Controller • Integrated Switch Box increased Switches • 27 or 75 MHz • Switch Box/# Controllers Dependent on $$$ • Antenna Length < 1m (3ft) • Frequency (VHF 30 – 300 Mhz) • Resonant Frequencies • Multiband (Harmonics) vs. Single Band • Half wavelength (feet) ½ λ wavelength, feet = 468/freq, MHz • Quarter wavelength (feet) ¼ λ wavelength, feet = 234/freq, MHz • Risk • Metallic Interference • Signal Loss ASEN 4018
Communications ASEN 4018
Data Acquisition • Design Alternatives • Onboard Data Storage • Data Logger / Software • Software available • Integration is easy • Real Time Telemetry • Transmit Data via Modem • Requires software development • Expensive ASEN 4018
Design To Specifications • Forward Speed • Pressure Transducer • 0-10 knots, +/- 0.1 knots • Depth • Pressure Transducer, Pole • 0-10 m, +/- 0.01m • Rotational Strafe Speed • Observation ASEN 4018
Design Issues and Risks • Issues: • Data Recorder not specified • Sensors not specified • Back up test plans needed • Testing facilities for 20m depth • Risks: • Sensor Failure Backup system verification needs to be developed (i.e. using stop watch to determine speed) ASEN 4018
Electronics System ASEN 4018
Design Issues and Risks • Issues: • Not all components identified • Integration • Risks: • Power Loss • Signal Loss Implementation of “failsafe” to surface • Water Intrusion Water sensor ASEN 4018
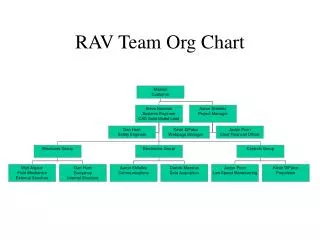
Project Management • Organization Chart ASEN 4018
Work Breakdown Structure ASEN 4018
Schedule & Budget • Task List • Drawing Tree • Budget • EEF Proposal • UROP Proposal • Meetings ASEN 4018
Conclusions • Objectives • Overall Vehicle Design • Hydrodynamics • Buoyancy • Propulsion • Low Speed Maneuverability • Communications • Electronics ASEN 4018
References • http://www.heiszwolf.com/subs/tech/tech01.html • Madsen, Chris, Vortex Jet Solid Model • Vehicles • MIT sub http://web.mit.edu/orca/www/ • Cornell Sub http://www.brainteam.org/ • Florida Atlantic sub http://www.oe.fau.edu/~auvcomp/index.html • Density of PVC and Aluminum www.plasticsrecycling.org • Density of Steel www.euro_inox.org/pdf/paper/Cunat_EN.pdf • Prices of Aluminum and Steel http://www.robotcombat.com/store.html • JSC Amateur Club • UUV Report, 2002-2003 • SDCL-DOME-0822, 21 September 2003 ASEN 4018
Questions ? ASEN 4018
Propulsion • Equations used in MATLAB analysis of motor power required. RPM: 3000 – 10000 RPM Prop Pitch: 50 – 200 mm/rev Prop Efficiency: 85% Motor Efficiency: 75% Drag: varied based on V and vehicle dimensions ASEN 4018
Propulsion • Requirements • Motor – Most critical, throttle-able, reversible, sufficient thrust to accelerate vehicle to 5 knots, designed for 10 knots. • Propeller – Pitch sized to meet required cruise speed based on motor RPM’s. Diameter sized to reduce tip drag, will be smaller than the diameter of the vehicle. • Batteries – Provide power to motor for 1 hour of cruise. • Shroud – 1 mm tolerance from propeller tip. Other specifications to be determined. • Overall Design • Single propeller in rear of vehicle • Powered by 6-24 Volts • 600-1000 RPM’s per Volt • 50-150 mm propeller diameter • 50-200 mm propeller pitch ASEN 4018
Buoyancy • Positive Buoyancy: Buoyant Force > Weight • Negative Buoyancy: Buoyant Force < Weight • Neutral Buoyancy: Buoyant Force = Weight Buoyant Force Weight • When Buoyancy System is empty the Submarine must be Positively Buoyant • When Buoyancy System is full the Submarine must be negatively Buoyant ASEN 4018
Buoyancy • MATLAB analysis of buoyancy system Net Force = Buoyant Force – Weight Buoyant Force = ρgV ASEN 4018
Buoyancy • Piston Ballast Tank • Self-Contained • Can be machined in-house • Sealing and pressure issues are minimal • Pressure Ballast Tank • Self-Contained • Can be machined in-house • Very pressure sensitive • Require added sensors [1] ASEN 4018