Download
1 / 31
310 likes | 483 Views
Hyperion Mobility Testing. July 28, 2003 Dimi Apostolopoulos Michael Wagner Kevin Peterson James Teza Stuart Heys. Hard Surface, July 2003. Atacama, April 2003. Sand Simulant, July 2003. Mobility Characterization Project. Hard Surface. Atacama 2003. Soil Simulant. Drive/Steer/Climb

E N D
Hyperion Mobility Testing July 28, 2003 Dimi Apostolopoulos Michael Wagner Kevin Peterson James Teza Stuart Heys Carnegie Mellon
Hard Surface, July 2003 Atacama, April 2003 Sand Simulant, July 2003 Mobility Characterization Project Carnegie Mellon
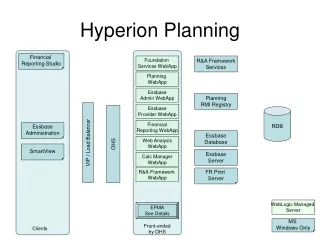
Hard Surface Atacama 2003 Soil Simulant Drive/Steer/Climb Torque/Power/Energy • Evaluate Performance • and Rethink Design • -Locomotion • -Mechanical Driveline • Traction/Steering Control • Mobility Sensing • Vehicle Electronics • Overall configuration • Payload accommodation Mobility Approach Carnegie Mellon
Weighing Hyperion Scale placed under each wheel Total weight in desert: 181.1 kg Lab experiments: 140 kg Hyperion 51.54 kg 39.78 kg 49.78 kg 40.00 kg Carnegie Mellon
Mobility Studies • Driving • Steering • Slope Grading • Discrete Obstacle Climbing • Drawbar Pull • Combined Feature Negotiation Carnegie Mellon
h I V h = 0.35-0.45 (total efficiency) iv / r Measured & Computed Variables • Power is measured into amplifiers • Torque is calculated through the following equation: • T = • Torque measurements are most accurate when robot driving straight and at higher velocities • Compute consumed locomotion power as the product of resistive force (T/r) and vehicle speed • Compute losses due to soil work Carnegie Mellon
Peaks occur near moment of ~10 deg pitch Atacama Flat Ground – Power Carnegie Mellon
Atacama Flat Ground – Torque 20 Nm 15 Nm Carnegie Mellon
Atacama Flat Ground – Rolling Resistance Carnegie Mellon
Flat Concrete Floor – Power Carnegie Mellon
Flat Concrete Floor – Torque Carnegie Mellon
Sandbox – Power Carnegie Mellon
Sandbox – Torque Carnegie Mellon
Flat Ground – Preliminary Summary • Max wheel power, considering only flat portions of terrain • Concrete floor: 40 W (rear right wheel) • Sandbox: 35 W (right wheels) • Atacama: 45 W (front right wheel) • Average wheel power • Concrete floor: 15 W • Sandbox: 20 W • Atacama: 30 W Carnegie Mellon
Slope Climbing in the Atacama Carnegie Mellon
Slope Climbing in the Atacama: 14 deg 25 Nm 35 Nm Carnegie Mellon
Slope Climb Testing in Lab Carnegie Mellon
Slope Climbing in the Lab: 30 deg Entire robot climbing ramp 50 Nm Entire robot climbing ramp 65 Nm Carnegie Mellon
Slope Climbing – Preliminary Summary • Max wheel power • Ramp: 85 W (30-deg slope) • Atacama: 70 W (14-deg slope) • Average wheel power • Ramp: 70 W (30-deg slope) • Atacama: 50 W (14-deg slope) Carnegie Mellon
Obstacle Climbing Carnegie Mellon
Reconstructing Terrain Features • Twist = steering roll – body roll • Robot width x sin(twist) = height of object • Can be used to quantify surface roughness Height: 20 cm Vehicle length Negative twist: Front left wheel climbing Positive twist: Rear left wheel climbing Carnegie Mellon
a b c d 20-cm Obstacle on Concrete Floor • Driving forward, front left wheel climbs obstacle • Driving forward, rear left wheel climbs obstacle • Driving backward, rear left wheel climbs obstacle • Driving backward, front left wheel climbs obstacle Carnegie Mellon
a b c d 20-cm Obstacle in Sandbox • Driving forward, front right wheel climbs obstacle • Driving forward, rear right wheel climbs obstacle • Driving backward, rear right wheel climbs obstacle • Driving backward, front right wheel climbs obstacle Carnegie Mellon
12-cm Obstacle in Atacama Carnegie Mellon
a c b 12-cm Obstacle in the Atacama • Robot’s front left wheel climbs obstacle • Robot stops, fails to climb obstacle • After a second command, rear left wheel climbs obstacle Carnegie Mellon
Obstacle Climbing - Preliminary Summary • Max instantaneous wheel power • Lab: 150 W (20-cm block) • Atacama: 120 W (14-cm rock) Carnegie Mellon
Load cell Wall Direction of travel Steel cable Drawbar Pull Tests • Drawbar pull is the force a vehicle can pull on a given soil • The drawbar pull is measured by attaching the robot to a load cell and steel cable • The robot is driven until the cable is tensioned and its wheels begin to slip • The drawbar pull is the maximum force sensed by the load cell Carnegie Mellon
Drawbar Pull Tests • Drawbar pull is a useful metric because it can be used to find the maximum climbable slope for a given soil type: • Max slope = atan(DP / weight) • Performed tests in cohesionless sand • This soil provides very little traction, similar to regions of loose sand seen in the Atacama Carnegie Mellon
Drawbar Pull Tests – Results • Robot driving normally • Cable tension rapidly increases • Wheels slipping • Motion controller fault, at least one wheel stops servoing • Robot reverses, cable goes slack c Max DP: 550 N Max slope: 22 deg d b e a Carnegie Mellon
Discussion (1) • Key total locomotion power results • Driving power: 100-150 W • Steering: ~1.5 x Driving • Slope: 250-350 W to climb 20-25 sandy slope • Slope continuous; battery thermal limit • Obstacle: 150-200 W per wheel • Multiple obstacles is the worst case Carnegie Mellon
Discussion (2) • Poor slope climbing and need for traction optimization motivate new locomotion system • Need for better and more payload accommodation, and new solar array layout motivate new chassis configuration • Must devise more precise/repeatable mobility to aid close-up science. Carnegie Mellon