Download
1 / 28
280 likes | 396 Views
Lecture 5: On-line search Constraint Satisfaction Problems. Reading: Sec. 4.5 & Ch. 5, AIMA. Recap. Blind search (BFS, DFS) Informed search (Greedy, A*) Local search (Hill-climbing, SA, GA 1 ) Today: On-line search Constraint satisfaction problems. On-line search.

E N D
Lecture 5:On-line searchConstraint Satisfaction Problems Reading: Sec. 4.5 & Ch. 5, AIMA Rutgers CS440, Fall 2003
Recap • Blind search (BFS, DFS) • Informed search (Greedy, A*) • Local search (Hill-climbing, SA, GA1) • Today: • On-line search • Constraint satisfaction problems Rutgers CS440, Fall 2003
On-line search • So far, off-line search: • Observe environment, determine best set of actions (shortest path) that leads from start to goal • Good for static environments • On-line search: • Perform action, observe environment, perform, observe, … • Dynamic, stochastic domains: exploration • Similar to… • …local search, but to get to all successor states, agent has to explore all actions Rutgers CS440, Fall 2003
Depth-first online • Online algorithms cannot simultaneously explore distant states (i.e., jump from current state to a very distant state, like, e.g., A*) • Similar to DFS • Try unexplored actions • Once all tried, and the goal is not reached, backtrack to unbacktracked previous state Rutgers CS440, Fall 2003
DFS-Online • functionaction = DFS-Online(percept) • s = GetState(percept); • ifGoalTest(s) return stop; • ifNewState(s) unexplored[s] = Actions(s); • if NonEmpty(sp) • Result[sp,ap] = s; • Unbacktracked[s] = sp; • end • If Empty(unexpolred[s]) • If Empty(unbacktracked[s]) return stop; • else • a: Result[ s, a ] = Pop( unbacktracked[s] ); • else • a = Pop( unexplored[s] ); • end • sp = s; • returna; • endcc Rutgers CS440, Fall 2003
Maze G s0 Rutgers CS440, Fall 2003
Online local search • Hill-climbing… • Is an online search! • However, it does not have any memory. • Can one use random restarts? • Instead… • Random wandering by choosing random actions (random walk) --- eventually, visits all points • Augment HC with memory of sorts: keep track of estimates of h(s) and updated them as the search proceeds • LRTA* - learning real-time A* Rutgers CS440, Fall 2003
LRTA* • functionaction = LRTA*(percept) • s = GetState(percept); • ifGoalTest(s) return stop; • ifNewState(s) H[s] = h(s); • ifNonEmpty(sp) • Result[sp,ap] = s; • H[sp] = min b Actions(sp) { c(sp,b,s) + H(s) }; • end • a = arg min b Actions(s) { c(s,b, Result[s,b] ) + H(Result[s,b] ) }; • end • sp = s; • returna; • endcc Rutgers CS440, Fall 2003
Maze – LRTA* 2 1 G 3 2 1 1 4 3 2 2 2 3 4 3 s0 3 3 3 3 4 4 4 4 4 4 4 Rutgers CS440, Fall 2003
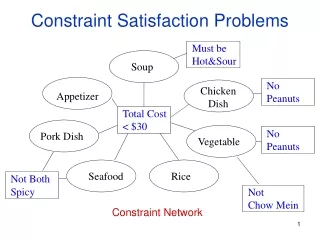
Constraint satisfaction problems - CSP • Slightly different from standard search formulation • Standard search: abstract notion of state + successor function + goal test • CSP: • State: a set of variables V = {V1, …, VN} and values that can be assigned to them specified by their domains D = {D1, …, DN}, Vi Di • Goal: a set of constraints on the values that combinations of V can take • Examples: • Map coloring, scheduling, transportation, configuration, crossword puzzle, N-queens, minesweeper, … Rutgers CS440, Fall 2003
Map coloring • Vi = { WA, NT, SA, Q, NSW, V, T } • Di = { R, G, B } • Goal / constraint: adjacent regions must have different color • Solution: { (WA,R), (NT,G), (SA,B), (Q,R), (NSW,G), (V,R), (T,G) } Rutgers CS440, Fall 2003
Constraint graph • Nodes: variables, links: constraints NT Q WA NSW SA V T Rutgers CS440, Fall 2003
Types of CSPs • Discrete-valued variables • Finite: O(dN) assignments, d = |D| • Map coloring, Boolean satisfiability • Infinite: D is infinite, e.g., strings or natural numbers • Scheduling • Linear constraints: aV1 + bV2 < V3 • Continuous-valued variables • Functional optimization • Linear programming Rutgers CS440, Fall 2003
Types of constraints • Unary: V blue • Binary: V Q • Higher order • Preferences: different values of V have different “scores” Rutgers CS440, Fall 2003
CSP as search • Generic: fits all CSP • Depth N, N = number of variables • DFS, but path irrelevant • Problem: # leaves is n!dN > dN • Luckily, we only need consider one variable per depth! – Assignment is commutative. • functionassignment = NaiveCSP(V,D,C) • 1) Initial state = {}; • 2) Successor function: assign value to unassigned variable that does not conflict with current assignments. • 3) Goal: Assignment complete? • end Rutgers CS440, Fall 2003
Backtracking search • DFS with single variable assignment Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Map coloring example NT Q WA Rutgers CS440, Fall 2003
How to improve efficiency? • Address the following questions • Which variable to pick next? • What value to assign next? • Can one detect failure early? • Take advantage of problem structure? Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Most constrained variable • Choose next the variable that is most constrained based on current assignment NT WA SA Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Most constraining variable • Tie breaker among most constrained variables NT Q SA Rutgers CS440, Fall 2003
Least constraining value • Select the value that least constrains the other variables (rules our fewest other variables) Rutgers CS440, Fall 2003
Forward checking • Terminate search early, if necessary: • keep track of values of unassigned variables Rutgers CS440, Fall 2003
Constraint propagation • FC propagates assignment from assigned to unassigned variables, but does not provide early detection of all failures • NT & SA cannot both be blue! • CP repeatedly enforces constraints Rutgers CS440, Fall 2003
Arc consistency • Simplest form of propagation makes each arcs consistent: • X -> Y is consistent iff for all x X, there is y Y that satisfies constraints • Detects failure earlier than FC. • Either preprocessor or after each assignment • AC-3 algorithm Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Problem structure • Knowing something about the problem can significantly reduce search time • T is independent of the rest! Connected components. • c-components => O(dcn/c) Rutgers CS440, Fall 2003
NSW V WA Q SA NT NT Q WA NSW SA V T Tree-structured CSP • If graph is a tree, CSP can be accomplished in O(nd2) • Flatten tree into a “chain” where each node is preceded by its parent • Propagate constraints from last to second node • Make assignment from first to last Rutgers CS440, Fall 2003
NT NT Q Q WA WA NSW NSW SA SA V V T T Nearly tree-structured problems • What if a graph is not a tree? • Maybe can be made into a tree by constraining it on a variable. • If c is cutset size, then O(dc (N-c)d2 ) Rutgers CS440, Fall 2003
Iterative CSP • Local search for CSP • Start from (invalid) initial assignment, modify it to reduce the number of violated constraints • Randomly pick a variable • Reassign a value such that constraints are least violated (min-conflict heuristic) • Hill-climbing with h(s) = min-conflict Rutgers CS440, Fall 2003