Download
1 / 26
280 likes | 540 Views
PID Feedback Controllers. Lei XIE Department of Control, Zhejiang University, Hangzhou, China 2013/3/20. Modeling Example #1. Material balance equation :. Relationship between flow and level :. Problem Discussion: How to build the controlled process with SimuLink?

E N D
PID Feedback Controllers Lei XIE Department of Control, Zhejiang University, Hangzhou, China 2013/3/20
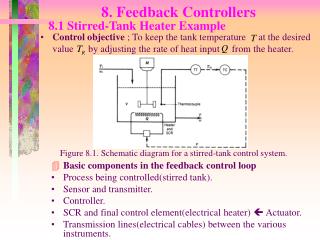
Modeling Example #1 • Material balance equation: • Relationship between flow and level: Problem Discussion: How to build the controlled process with SimuLink? (\ProcessModel\ LevelProcess01.mdl)
Contents • Selection of Valve Action (调节阀作用选择) • Action of Feedback Controllers (反馈控制器的正反作用) • Performance Criterion of Process Control Systems (过程控制系统的性能指标) • Understand P, PI and PID Controllers • Problem Discussion
Control Valve Selection Examples Ex. 2 Ex. 1
Action of Control Valves • Types of control valves (1) Fail-closed valve (气开阀): if no signal exists (or the input signal of valve is zero), the valve will be closed. (2) Fail-opened valve (气关阀): if no signal exists, the valve will be opened completely. • Selection of valve type If one hope the valve closed when the power is off, he must select fail-closed valve; otherwise, he must select fail-opened valve.
Types of Control Valves Fail-opened Valve (气关阀) Fail-closed Valve (气开阀)
Control Valve Selection Examples Ex. 2 Ex. 1
Action of Controllers • Direct Action (正作用) when the signal from the transmitter increases, the controller output also increases. • Reverse Action (反作用) when the signal from the transmitter increases, the controller output decreases on the contrary. • Note: The set point is not part of decision.
Selection of Controller Action Principle: to construct a negative feedback loop ?
Controller Action Selection Ex. 1 Considering the safety of the control system, the steam valve must be a fail-closed valve, sou↑→ RV↑. (Why ?) Assume the controller is set to direct action. If T↑, then Conclusion: the controller must be set to reverse action because if it is set to direct action, we cannot build a negative-feedback system.
Controller Action Selection Ex. 2 The coolant valve must be a fail-opened valve, sou↑→ Fw↓. (Why ?) Assume the controller is set to direct action. If T↑, then Other methods ? Conclusion: the controller must be set to reverse action.
Controller action selection based on loop analysis Ex. 1 Step 1: plot block diagram Step 2: indicate the action direction for each block except the controller. Step 3: determine the action of the controller to construct a negative feedback loop (+) TC 22 must be reverse (+) (+) (+)
Controller action selection based on loop analysis Ex. 2 TC 25 must be a reverse controller (-) (+) (-) (+)
Performance Criterion of Process Control Systems • Offset (余差): • Decay Ratio (衰减比): • Period of Oscillation (振荡周期): • Setting Time (调节时间) ts Which is the best response ?
Proportional Controller KC is the controller gain (控制器增益).
Effect of Controller Gain on Controller Output Kc establishes the sensitivity of the controller to an error
Effect of Proportional Gain on Control Performances • P controllers have only one tuning parameter, Kc. However, they suffer a major disadvantage – there exists an Offset of the controlled variable from the set point. (Why ?) • For a given step disturbance, the magnitude of the offset depends on the value of the gain. The larger the gain, the smaller the offset. • Above a certain Kc, most processes go unstable.
About the Proportional Band • Definition: proportional band (比例带)refers to the error (expressed in percent-age of the range of the controlled variable) required to move the output of the controller from 0% to 100%.
Proportional-Integral (PI) Controller Ti is the integral time, or the reset time
Simulation of PI Control Loop Fi(t) increases from 10 liter/min to 11 liter/min at time = 10 min. See ../PIDControl/LevelPIControlLoop.mdl
Effect of Integral Action on Control Performances • PI controllers have two tuning parameter: the gain or proportional band, and the integral time or the integral rate (1/Ti ). The advantage is that the integration removes the offset. (Why ?) • The disadvantage of PI controllers is that the addition of integration adds some amount of instability to the system. The smaller the integral time, the stronger the integral action, the faster the system removes the offset, but the weaker the stability of the system.
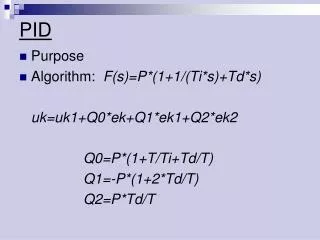
Proportional-Integral-Derivative (PID) Controller • Ideal PID Controller Td is the derivative time. • Industrial PID Controller Ad is called the derivative gain (微分增益).
Response of Real PID Controller Discuss the effect of Td and Ad on the output of the controller. Please see PIDControl /PIDController.mdl
Simulation of PID Loop Ti(t) increases from 50 Cent. to 60 Cent. at time = 10 min. See ../PIDControl/PIDLoop.mdl
Effect of Derivative Action on Control Performances • PID controllers have three tuning parameter: the gain, the integral time and the derivative time. The derivative action gives the controller the capability to anticipate. • PID controllers are recommended for use in slow processes with long time constants, such as temperature loops, which are usually free of noises. For fast processes with noises, such as flow loops and pressure loops, the use of derivative action will amplify the noise and therefore should not be used.
Problem Discussion • For a stable controlled process, there exist offset when a P controller is used. Why? • When we use a PI controller, there is no offset if the closed-loop system is stable. Please explain its reason.