Download
1 / 11
110 likes | 251 Views
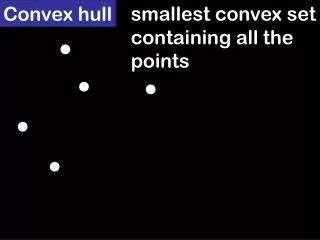
Tight Bounds for Dynamic Convex Hull Queries (Again). Erik Demaine Mihai P ătraşcu. Dynamic Convex Hull. Set S , |S|≤n points in 2d: insert point delete point. update time t u. linear programming tangents. query time t q. History. π. π. π. So what are you going to improve?.

E N D
Tight Bounds for Dynamic Convex Hull Queries(Again) Erik DemaineMihai Pătraşcu
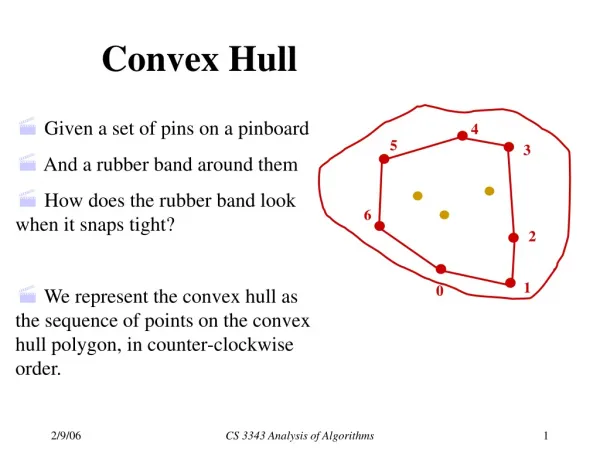
Dynamic Convex Hull Set S, |S|≤n points in 2d: • insert point • delete point update time tu • linear programming • tangents query time tq
History π π π So what are you going to improve?
O(lgn) = Optimal? bounded precision say, w bits NO!radix sort, hashing, closest pair in O(n)… Sorting: O(n√lglgn) n·2O(√lglgn) Voronoi, segment intersection etc. Searching:O(min{lgwn, lgw}) O(min{lgn/lglgn, √w/lgw}) 1d 2d PătraşcuFOCS’06 ChanFOCS’06 Chan, P. STOC’07 predecessor search point location
Motivation: Information O(lgn) binary search in each step, reduce entropy by 1 bit => O(lgn) fusion trees:a sketch of w bits allows search among √w values => each step reduces entropy by ½lgw => O(lgwn) different information concepts H(s1,s2)=lgℓ+lgr can sketch k segments, if all H(si,si+1)≥H(s1,sk)/k 1d 2d s1 r ℓ s2
Static Dynamic Convex Hull • linear programming=> predecessor search e.g. O(lgw)<= [Chazelle] • tangents=> planar point location e.g. O(√w) 1 6 4 5 6 2 5 1 3 2 4 3
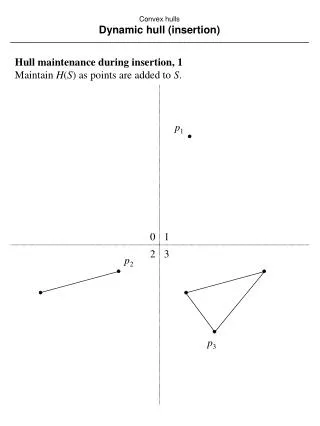
History Updating
Review of [Overmars, van Leeuwen] • split with vertical line • compute 2 hulls recursively => O(lgn) levels • find bridges -- O(lgn) • cut+merge hull trees -- O(lgn) => tu=O(lg2n) • examine bridges • recurse left or right => tq=O(lgn)
Proof sketch • split intolgn subhulls => depth O(lgn/lglgn) • query: • remember: “can sketch k segments, if all H(si,si+1)≥w/k”=>superconstant time/level if some H is small • information efficiency:H only decreases through recursion • info efficiency => cannot be slow too many timesH acts as potential, bounding running time • locate among 2lgn bridges • recurse
Summary: Our Contribution • “dynamic geometry with bounded precision” • lots of geometry =>[Overmars, van Leeuwen] is informationally efficient • lower bound • 1d-like structure for LP OPEN: [Chan], [Brodal-Jacob] not info efficient… OPEN:O(lgn/lglgn) vs. Ω(lgwn) OPEN:Improve updates. Can tu<<lgn ??
T H E E N D