Download
1 / 14
160 likes | 538 Views
D4 - Antiderivatives. IB Math HL/SL. (A) Review. To date, what we have presented are differentiation techniques (power rule, sum/diff rule, product rule, quotient rule, chain rule)

E N D
D4 - Antiderivatives IB Math HL/SL
(A) Review • To date, what we have presented are differentiation techniques (power rule, sum/diff rule, product rule, quotient rule, chain rule) • As well as looking at the derivatives of a variety of different functions (power, exponential, logarithmic, trigonometric) • And we’ve looked at a variety of applications as well (curve sketching, optimization, motion, related rates)
(B) Antiderivatives - Graphically • We have already come across the notion of antiderivatives informally when we graphed functions • If we had a graph of f `(x), we could make a rough sketch of the graph of f(x) from our curve sketching principles
(B) Antiderivatives - Graphically • So we used ideas about increase/decrease and max/mins, roots and positive/negative on the derivative to put together graphical features of the original function (concavity, inflection points, critical values, and increase/decrease) • Now the question becomes can we work through the same idea of “working backward” when we have algebraic equations, rather than graphs with which to work
(C) Motion, Derivatives and Antiderivatives • If we are given a distance (or position) function, we can easily find the velocity function • If d(t) = t3 – sin(t) + e2t, • Then v(t) = d `(t) = 3t2 - cos(t) + 2e2t • Likewise, we can find the acceleration: • a(t) = v`(t) = d ``(t) = 6t + sin(t) + 4e2t • Now the question we will focus on is what happens if we are given the velocity equation and we want to “work” backward to the find the distance equation? Or if we have the acceleration equation and want to find the distance equation? • We would simply have to “undo” the derivative that we did when we went from the distance equation to the velocity equation in the first place hence the idea of an “antiderivative”
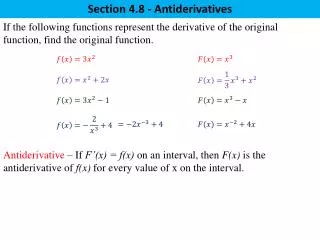
(D) Simple Antiderivatives - Motion • If v(t) = t4 – 6t2 + 4, find d(t) • So we need to “undifferentiate” or “antidifferentiate” 3 functions (t4, 6t2, 3) • So what equation did we differentiate to get t4 recalling the power rule, it must have been a t5 expression but the derivative of t5 is actually 5t4 so if we have only t4 as our “derivative”, then we are “off” by 1/5 so our “antiderivative” must be 1/5t5 (test by differentiating which does in fact give us 1t4) • Likewise, to have 6t2 as a derivative, we must have started with a t3 function but which one? if we differentiate t3, we get 3t2, so seeing that we have a 6t2, we clearly have twice what we need so we must have started with 2t3 or one-third of 6t3 (test by differentiating which does in fact give us 6t2) • And then consider the 4 (or 4x0) we must have started with an x1 function but which one? if we differentiate x1, then we get 1x0 we have 4x0, so we have four times what we need so we must have started with 4x1 or simply 4x (test by differentiating which does in fact give us 3) • So we have simply looked at power functions and seen a method for “undoing” a power rule add one to the exponent, then adjust the coefficient by dividing by the new exponent
(D) Simple Antiderivatives - Motion • So we have seen one trend to take the antiderivative of xn, we get xn+1÷ (n+1) • So if dy/dx = xn (meaning that xn was the derivative), then y = xn+1 ÷ (n+1) (meaning that we have now found the original function xn+1 ÷ (n+1) ) • SPECIAL NOTE: • The notation presented in our textbook uses f(x) to denote dy/dx such that when we have found y, the textbook calls the antiderivative function (or the original function) F(x) • So f(x) = dy/dx and then F(x) = y or we can also say that F`(x) = f(x) (meaning that if we take the derivative of our antiderivative, we get back our original function)
(E) Simple Antiderivatives – Motion and Initial Conditions • One other point needs to be addressed so let’s work with an easier function • Say v(t) = 4t (or rather d`(t) = 4t) then what is d(t)?? • If we anti-differentiate, we would predict d(t) = 2t2, but we need to realize that there is more to it than that Why? lets consider some derivatives and some graphs
(E) Simple Antiderivatives – Motion and Initial Conditions So our derivative of y` = 4x could have come from any of the three “antiderivatives” of y = 2x2 or y = 2x2 + 4 or y = 2x2 – 6 or any other combination of y = 2x2 + C, where C is simply a constant that changes the y-intercept of the original parabola 2x2
(E) Simple Antiderivatives – Motion and Initial Conditions • So back to our original problem if v(t) = t4 – 6t2 + 4, find d(t) • We have worked out that d(t) = 1/5t5 – 2t3 + 4t • Having just seen the last graphic discussion about “families of curves”, we realize that we need to add some constant to the “antiderivative” equation (the distance equation) so our equation for d(t) becomes d(t) = 1/5t5 – 2t3 + 4t + C which we will call our most general solution • Now, if we knew some information about the distance function, we could solve for C and complete our equation say at t = 0 sec, then d(0) = 2 m (the initial position of the object was 2 meters beyond some reference point) • Now d(0) = 1/5(0)5 – 2(0)3 + 4(0) + C = 2 C = 2 • Thus d(t) = 1/5t5 – 2t3 + 4t + 2 is our final specific solution
The functions: dy/dx = xn dy/dx = 0 dy/dx = 1 dy/dx = 1/x dy/dx = ekx dy/dx = coskx dy/dx = sinkx The antiderivatives: y = xn+1 / (n+1) + C y = 1 y = x + C y = ln|x| + C y = 1/k ekx + C y = 1/k sin(kx) + C y = -1/k cos(kx) + C (F) Common Antiderivatives
(G) Examples • Find the antiderivatives of: • (i) f(x) = 2x2 – x + 7 • (ii) f(x) = cos(x) – sin(2x) • (iii) f(x) = -3e-x + 6e2x • (iv) f(x) = 2/x2 – 5/x + x • (v) f(x) = sin(x) + 1/x3 • (vi) f(x) = sin(x)cos(x)
(G) Examples • (vii) Solve ds/dt = 2t given that s = 3 when t = 0 • (viii) Find y if y` = 6x2 + 6x and y(-1) = 0 • (ix) A stone is tossed upward at an initial velocity of 8 m/s from the edge of a cliff that is 63 m high. How long will it take the stone to hit the ground? (HINT: we know that a = -9.8 m/s2) • (x) A particle is accelerated along a line so that its velocity is equal to the square root of the elapsed time. How far does the particle travel in the first hour, if the particle started 200 meters away from a given reference point
(H) Homework • Stewart, 1989, Chap 9.1, p408, Q1-8 • Stewart, 1989, Chap 9.2, p411, Q1-5 • Stewart, 1989, Chap 9.3, p415, Q1-6