Download
1 / 12
120 likes | 217 Views
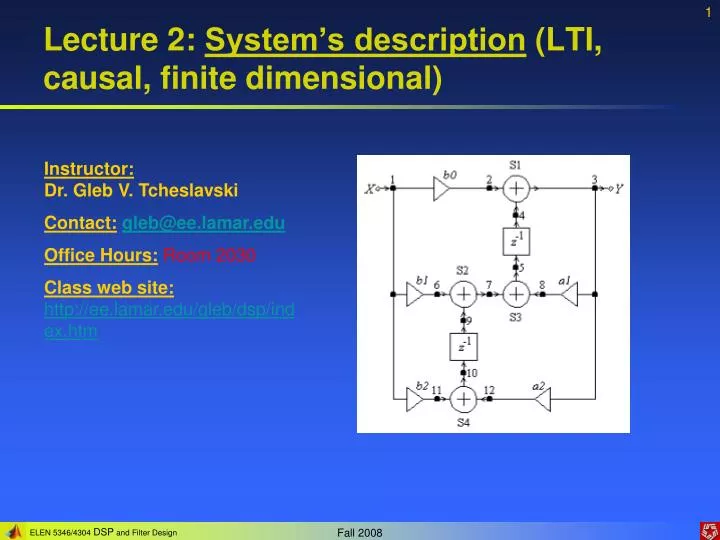
Lecture 2: System’s description (LTI, causal, finite dimensional). Instructor: Dr. Gleb V. Tcheslavski Contact: gleb@ee.lamar.edu Office Hours: Room 2030 Class web site: http://ee.lamar.edu/gleb/dsp/index.htm. y n. x n. b 0. +. +. +. +. z -1. z -1. a 1.

E N D
Lecture 2: System’s description (LTI, causal, finite dimensional) Instructor: Dr. Gleb V. Tcheslavski Contact:gleb@ee.lamar.edu Office Hours: Room 2030 Class web site:http://ee.lamar.edu/gleb/dsp/index.htm
yn xn b0 + + + + z-1 z-1 a1 xn-1 * Δ yn-1 b1 memory z-1 z-1 b2 a2 yn-2 xn-2 z-1 z-1 … … The Signal Flow Graph for a BIBO stable LTI finite-dimensional system (2.2.1) * Δ yn is a function of previous (and current) inputs and outputs, therefore the system is causal. If ak and bm are constants → Linear Constant coefficient Difference Equation Signal Flow Graph (SFG): Remark: because we discretize the signal by amplitude, the system becomes non-linear!
Difference equation (2.3.1) yn is a function of ak, bm, xn, memory = states. (2.3.2) If we know the initial conditions, we can solve the difference equation: If (2.3.1) is a linear constant coefficient difference equation, the output consists of a homogeneous solution and a particular solution: yn = yh,n + yp,n (2.3.3)
Homogeneous (complementary) solution Homogeneous equation: (2.4.1) (2.4.2) (2.4.3) The characteristic equation has N characteristic roots:1, … N • If the system is real, xn, yn, and all the coefficients (a, b) are real • For LTI systems hn are real → roots are either real or complex conjugate pairs • is a form of solution, where ci depend on initial conditions. • if 1 = 2, solution in form of (2.4.4) (2.4.5)
Particular solution “We apply an input and see what happens to the output for large n” Assumption: yp,n has the same form as xn: Ex.: (2.5.1) Characteristic equation: (2.5.2)
xn z-1 xn-1n z-1 xn-1n … + + Alternative form Memory is empty (relaxed system) We can find a solution in form: yn = yzi,n + yzs,n (zero input + zero state) (2.6.1) The output will be linear iff both: zero input and zero state are linear. For a relaxed system: xn = n→ yn = hn- zero state response! (2.6.2)
Example… Let’s find yzi,n for the example in (2.5.1). Assuming zero input, yp,n = k (a constant) and must satisfy the LCCDE (2.7.1) Difference Equation: (2.7.2) “large enough n” implies that all terms are “active”: in our case, n ≥ 2 In form of homogeneous solution (2.7.3) (2.7.4) (2.7.5) (2.7.7) (2.7.6)
Example (cont) is LTI (2.8.1) Got so far: (2.8.2) (2.8.3) (2.8.4) By substituting (2.8.4) into (2.8.1) for large n, we get: (2.8.5) (2.8.6) (2.8.7) DE (2.8.8)
Example (cont 2) What’s about the zero state solution yzs,n? (2.9.1) (2.9.2) (2.9.3) (2.9.4) (2.9.5)
yss,n dominates For large n Example (cont 3) (2.10.1) Another representation: transient response steady state response (2.10.2)
Example (cont 4) To evaluate a system’s unit pulse response hn when (2.11.1) Particular: (2.11.2) (2.11.3) DE: (2.11.4) (2.11.5) (2.11.6)
Example (cont 5) (2.12.1) (2.12.2)