Download
1 / 25
250 likes | 416 Views
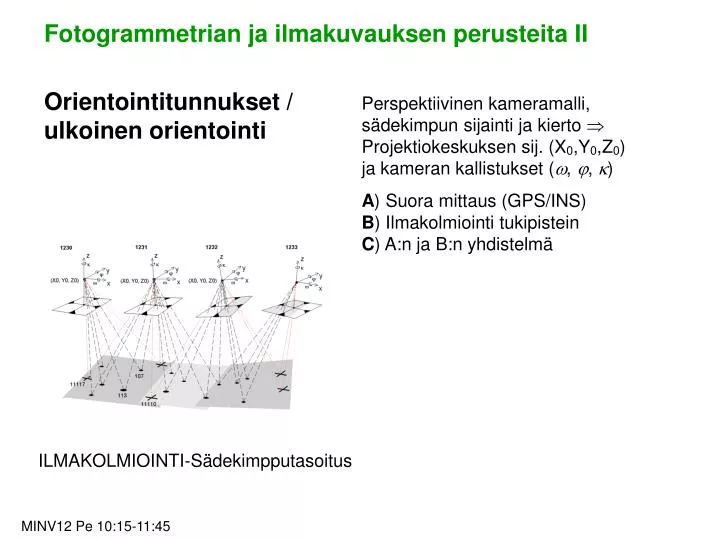
Fotogrammetrian ja ilmakuvauksen perusteita II. Orientointitunnukset / ulkoinen orientointi. Perspektiivinen kameramalli, sädekimpun sijainti ja kierto Projektiokeskuksen sij. (X 0 ,Y 0 ,Z 0 ) ja kameran kallistukset ( , , )

E N D
Fotogrammetrian ja ilmakuvauksen perusteita II Orientointitunnukset / ulkoinen orientointi Perspektiivinen kameramalli, sädekimpun sijainti ja kierto Projektiokeskuksen sij. (X0,Y0,Z0) ja kameran kallistukset (, , ) A) Suora mittaus (GPS/INS)B) Ilmakolmiointi tukipisteinC) A:n ja B:n yhdistelmä ILMAKOLMIOINTI-Sädekimpputasoitus MINV12 Pe 10:15-11:45
Suora georeferointi ja GPS-avusteinen ilmakolmiointi • Inertiaalipaikannus; näytteenotto esim. 50 Hz, tarkkaa lyhyen ajan sisällä, virheet kasautuvat ajan kuluessa- GPS:llä hyvä absoluuttinen tarkkuus, mutta näytteenotto harvaa, esim. 1 Hz. Ongelmia jos tulee vaihekatko (vaikutus voi olla metrejä) ipi.uni-hannover.de Saadaan havaintoja orientointituntemattomille(X0,Y0,Z0) ja (, , ).RTK-GPS ja VRS-GPS MINV12 Pe 10:15-11:45
Suora georeferointi ja GPS-avusteinen ilmakolmiointi Ilmakolmiointi edellyttää tunnettuja tukipisteitä ja liitospisteitä. Esim. saaristo ja suurten vesistöjen vallitsemat alueet ongelmallisia. Jos kuvia ei saada liitettyä kunnolla toisiinsa, virheet leviävät myös lähiympäristön kuviin. GPS:n antamien (X0, Y0, Z0) lisäksi tarvitaan kulmahavainnot (, , ). GPS-havainnot projektiokeskuksille vähentävät tukipisteiden tarvetta olennaisesti kustannusvaikutus. MINV12 Pe 10:15-11:45
Suora georeferointi ja GPS-avusteinen ilmakolmiointi MINV12 Pe 10:15-11:45
Suora georeferointi ja GPS-avusteinen ilmakolmiointi Jos DSO onnistuu, saadaan orientointituntemattomat keskivirheillä: (X0) = (Y0) = (Z0) ~ 0.1 m (VRS - GPS) ()= () ~ 45 rad, () ~ 70 rad. Systemaattiset virheet mahdollisia, kuvablokissa syytä olla joitakin tukipisteitä (alueita) näiden löytämiseksi ja eliminoimiseksi. Jos polttoväli ei ole kalibroidussa arvossaan siirtyvät kuvilta mitatut pisteet Z-suunnassa #%, missä #% on polttovälin virhe. MINV12 Pe 10:15-11:45
Tavoite: (X0, Y0, Z0, , , ) N kpl kuvalleHavaitaan pisteitä kuvilla, joille kuvakoordinaatit (x,y)Osalle pisteistä tunnetaan XYZ, XY tai Z maastossaOsalle kuvia voidaan tuntea (X0, Y0, Z0, , , ) (DSO)Pisteiden välille voidaan asettaa ehtoja XYZ, XY, ZPisteiden lisäksi voidaan tuntea etäisyyksiä. suuntia, tasoja tai pintoja joita voidaan hyödyntää. Ilmakolmiointi MINV12 Pe 10:15-11:45
Ilmakolmiointi - sädekimpputasoitus Ratkaistaan (unknowns): - Kameroiden paikat (X0,Y0,Z0)- Kallistukset eli suuntakosinit rij 3x3 kpl, kiertoja 3: (X) (Y) (Z), kallistukset lasketaan kierroista, joita ratkotaan. - Liitospisteiden koordinaatit X,Y,Z- Lisäparametrit...(kameran kalibrointi)Tunnetaan (observations): - Kuvahavaintoja (x,y)- Tukipisteitä, XYZ, XY, Z- 3D-etäisyyksiä, suuntakulmia, GPS-havaintoja, INS-havaintoja- Lähtölikiarvot tuntemattomille- EhtojaKäytetään: PNS-virheyhtälötasoitusta (linearisoiduilla havaintoyhtälöillä) MINV12 Pe 10:15-11:45
Ilmakolmiointi - sädekimpputasoitus Kuvablokki: Ilmakuvia, joilla yhteistä peittoaluetta (2D/3D) Liitospiste: yl. signaloimaton, rakennettua ympäristöä, kivet, jne. Tukipiste: Kohdekoordinaatit (XYZ,XY,Z) tunnetaan, tavallisesti korkeilla paikoilla kalliossa (kolmiopisteet), teiden lähistöillä (vaaitusreitit, GPS-kampanjat), peitto epätasainen, RTK tai VRS-GPS:llä voi mitata lisää. Lähtölikiarvot: Kuvanottopisteet (X0,Y0,Z0) ja lentolinjan suunta () GPS-havainnoista, pystykuvat ( ja = 0). Liitospisteille kartalta tai kuvilta leikaten. Tehtävän koko: Virheyhtälöistä rakennematriisi A ja normaalimatriisi ATPA. dim(ATPA) = 6 x kuvien määrä + 3 x liitospisteet + tuntemattomien tukipiste-koordinaattien lkm Jokainen kuvahavainto tuo kaksi riviä matriisiin A. Ehtoyhtälöt (lisähavainnot) lisäävät A kokoa. MINV12 Pe 10:15-11:45
Ilmakolmiointi - sädekimpputasoitus • PNS-tasoitus • Lähtölikiarvot ja havainnot2) Linearisoi, muodosta A, P ja l3) Ratkaise parannus likiarvoihin x = (ATPA)-1ATPl4) Lisää x ja palaa kohtaan 2) paitsi jos ||x|| on häviävän pieni, jos ||x|| ei pienene ongelmia yhtälöryhmässä • Painot diagonaalimatriisissa P kuvaavat havaintojen variansseja. Tasoituksessa voi olla yht’aikaa kuvahavaintoja (um), koordinaatteja (m), kulmia (rad), etäisyyksiä (m). A on hyvin harva ja normaaliyhtälöt pos-def. MINV12 Pe 10:15-11:45
Ilmakolmiointi - sädekimpputasoitus Tarkkuuden arviointi MINV12 Pe 10:15-11:45
Ilmakolmiointi - sädekimpputasoitus Tarkkuuden arviointi Jäännösvirheet kuvatasolla, 0Jäännösvirheet eteenpäinleikatuissa XYZ-pisteissäRiippumattomat, kolmioinnissa käyttämättä jätetyt XYZ-pisteetOrientointituntemattominen ja liitospisteiden koordinaattien estimoidut keskivirheet 0 sqrt(diag(ATPA)-1) Virheiden etsintä.... MINV12 Pe 10:15-11:45
Ilmakolmiointi - sädekimpputasoitus Jäännösvirhevektorit kuvalle FM022041230, 1:6000 JäännösvirhevektoritXYZ-tukipisteelle n:o 1006kierrettynä karttaproj.20 ja 30 mikronin ympyrät. Virheiden etsintäkarkeat vs. pienetabsorboituminen MINV12 Pe 10:15-11:45
Ilmakolmiointi – Maastotukipisteiden mittaus RTK-GPSVRS-GPSVerkko-GPSMML/GL-pistearkisto MINV12 Pe 10:15-11:45
Ilmakolmiointi – Maastotukipisteiden mittaus Pisteen D XYZ tuntematon, Piste C on D:n projektio maan pinnalle.Mitataan mittanauhalla vaakasuora linja A-C suuntaan, jossa on vapaata GPS-näkyvyyttä.Mitataan GPS:llä A ja B suoralta A-C. Mitataan mittanauhalla etäisyys d ja korkeusmittarilla B:n ja D:n korkeusero. Mitkä ovat D:n virhe-ellipsoidin mitat? MINV12 Pe 10:15-11:45
Ilmakolmiointi – Maastotukipisteiden mittaus Esim.GPS-tarkkuus (X)VRS = (Y)VRS = (Z)VRS = 0.05 mKorkeuseron mittaustarkkuus (ZBD) = 0.25 md:n mittaustarkkuus mittanauhalla (d) = 0.01 mA-C 20 m, A-B 10 m ellipsoidi 0.051 m 0.120 m 0.255 mA-C 10 m, A-B 5 m ellipsoidi 0.051 m 0.120 m 0.255 mA-C 20 m, A-B 15 m ellipsoidi 0.051 m 0.070 m 0.255 mA-C 20 m, A-B 5 m ellipsoidi 0.051 m 0.250 m 0.255 m Virhe-ellipsoidi pienin aina A-C:n suunnassa ja suurin kohtisuorassa suunnassa johtuen A-B:n vipuvaikutuksesta.Tarkastelussa oletetaan, että C saadaan täsmällisesti ja korkeuseron hajonta on vakio. (Viputarkastelu(GPS).xls) MINV12 Pe 10:15-11:45
Pisteen XYZ-koordinaattien määritystarkkuus Kuvausgeometria- kuvasäteiden väliset kulmat kohteessa- f 15 21 cm, Z-tarkkuus heikkenee- mittakaava vaikuttaa tarkkuuteenHavaintovirheet kuvatasolla; pisteen osoittamisen tarkkuus, esim. 10 um (pikseli), virhe-ellipsin muoto (eril. latvat, kulmat). Kuvien lkm lisääminen parantaa tarkkuutta, mutta rajallisesti.Orientointivirheet: Sädekimppujen leikkauspisteet (fotogrammetrinen 3D malli) voivat olla siirtyneitä, kiertyneitä, paikallisesti “vääntyneitä” ja 3D mallin mittakaava voi olla virheellinen eri koordinaattiakselien suunnassa täydellisetkin kuvahavainnot tuottavat virheellisiä koordinaatteja. MINV12 Pe 10:15-11:45
Pisteen XYZ-koordinaattien määritystarkkuus Kuvapari, 60 % peitto, f = 153 mm, puun latvan x-parallaksin havaintotarkkuus 15 um – 30 umS(Z) 1:5000 0.12 m – 0.24 mS(Z) 1:10000 0.24 m – 0.48 m f = 210 mmS(Z) 1:10000 0.34 m – 0.68 m DEMO 4 MINV12 Pe 10:15-11:45
Pisteen XYZ-koordinaattien määritystarkkuus Monte-Carlo Simulaattori 1) Muodostetaan kuvablokki ilmakolmiointia varten; Mitataan tarkat kuvahavainnot ja maastokoordinaatit tukipisteille;2) Varioidaan kuva (xy) ja tukipiste (XYZ) -havaintoja kuvilla ja maastossa3) Ratkaistaan ilmakolmiointi (orientointi kuville)4) Mitataan kuvilta piste, varioidaan kuvahavaintoja ja lasketaan pisteen sijainti saadulla orientoinnilla, Print XYZLoop 2) 4) 100-1000Tutkitaan XYZ-havaintojen vaihtelua. MINV12 Pe 10:15-11:45
Esimerkki-simulaatioIlmakuvat 1:6000; 60 % pituuspeitto, 8 x XYZ, 1 x Z, 19 x tie MINV12 Pe 10:15-11:45
Esimerkki-simulaatioIlmakuvat 1:6000; 60 % pituuspeitto, f = 153 mm Piste 2/3 kuvalla MINV12 Pe 10:15-11:45
Esimerkki simulaatio 1 Kolmiointi: Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.1 m, (Z) = 0.2 mKuvamittaus: Kuvalta mitattujen uusien pisteiden (x,y) havaintovirhe = 15 um100 toistoa piste 3 kuvalla (X,Y) = 0.12 m, (Z) = 0.13 m “ 2 “ (X,Y) = 0.11 m, (Z) = 0.30 m Entä, jos piste, esim. latva on hankala osoittaa?; esim. koivulla voisi olettaa 0.5 metrin virheen, mikä vastaa noin 70 mikronia kuvalla ; Kuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 70 um100 toistoa piste 3 kuvalla (X,Y) = 0.36 m, (Z) = 0.54 m “ 2 “ (X,Y) = 0.34 m, (Z) = 1.10 m Havaintovirheiden vaikutus riippuu kuvausgeometriasta (mittakaava ja kuvien/leikkaavien suorien määrä) MINV12 Pe 10:15-11:45
Esimerkki simulaatio 2 Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.1 m (Z) = 0.2 mKuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 15 um100 toistoa piste 3 kuvalla (X,Y) = 0.12 m, (Z) = 0.13 m “ 2 “ (X,Y) = 0.11 m, (Z) = 0.30 m Entä, jos tukipisteet on mitattu “huonolla” GPS:llä?Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.5 m (Z) = 0.8 mKuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 15 um100 toistoa piste 3 kuvalla (X,Y) = 0.40 m, (Z) = 0.24 m “ 2 “ (X,Y) = 0.35 m, (Z) = 0.58 m Ilmakolmioinnin tukipisteiden kohina siirtyy osin eteenpäinleikattuihin koordinaatteihin. Suuri määrä tukipisteitä kompensoisi ko. satunnaiset virheet
Esimerkki simulaatio 3 Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.1 m (Z) = 0.2 mKuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 15 um100 toistoa piste 3 kuvalla (X,Y) = 0.12 m, (Z) = 0.13 m “ 2 “ (X,Y) = 0.11 m, (Z) = 0.30 m Entä, jos tukipisteet on mitattu “huippu-GPS:llä?”Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.01 m (Z) = 0.02 mKuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 15 um100 toistoa piste 3 kuvalla (X,Y) = 0.08 m, (Z) = 0.12 m “ 2 “ (X,Y) = 0.08 m, (Z) = 0.27 m Hyöty minimaalinen. 0.1 m XY ja 0.2 m Z-tarkkuus (GPS) oli riittävä. Huomioi havaintovirheet kuvilla, 8 um. 8E-66000 ~ 4.8 cm ja 15E-66000 ~ 9 cm.
Esimerkki simulaatio 4 Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.1 m (Z) = 0.2 mKuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 15 um100 toistoa piste 3 kuvalla (X,Y) = 0.12 m, (Z) = 0.13 m “ 2 “ (X,Y) = 0.11 m, (Z) = 0.30 m Entä, jos tukipisteet on mitattu “huippu-GPS:llä? ja mitataan selkeitä kohteita, joissa havaintovirhe on pieni?”Tuki- ja liitospisteiden mittaustarkkuus kuvalla (x,y) = 8 umTukipisteiden tarkkuus maastoossa (X,Y) = 0.01 m (Z) = 0.02 mKuvalta mitattujen uusien pisteiden (x,y)(havaintovirhe) = 8 um100 toistoa piste 3 kuvalla (X,Y) = 0.06 m, (Z) = 0.08 m “ 2 “ (X,Y) = 0.05 m, (Z) = 0.14 m Ollaan lähellä maksimaalista käytännön tarkkuutta 1:6000 kuvilla f = 153 mm, p = 60 % MINV12 Pe 10:15-11:45
Pisteen XYZ-koordinaattien määritystarkkuus 1) Blokin sisällä mallien on oltava oikeassa asennossa ja paikassa malleilta eteenpäinleikattujen pisteiden koordinaatit harhattomia (Malli = kuvapari, kuvakolmoset,...)2) Kameran kompensoimattomat piirtovirheet voivat siirtää havaintoja max 5 um (mittakamerat). Ei-mittakamerat kalibroitava!3) Saman pisteen havaitseminen kuvilta monoskoppisesti, (x, y) –virheitä (havaintovirheet). Kohteiden geometria ja radiometria. Huom. erilaiset puiden latvat!4) Kuvausgeometria: mittakaava ja kuvien lukumäärä.Simuloimalla mahdollista tutkia kuvablokin geometrista vakautta.Kuvapareilla XY-tarkkuus hyville kohteille ~ 8 um ( mittakaava) Z-tarkkuus hyville kohteille ~ 15 um ( mittakaava) - Stereomittauksessa mukana subjektiivinen elementti DEMO 5 MINV12 Pe 10:15-11:45