Download
1 / 1
10 likes | 85 Views
m i 3. m i 2. m i 1. m i 4. r i 1. r i. m i. m i 7. O i+ 1. a i,i+ 1. d i 1. m i 5. m i 6. d i. O i. Minimization of Constraint Forces in Industrial Manipulators*.

E N D
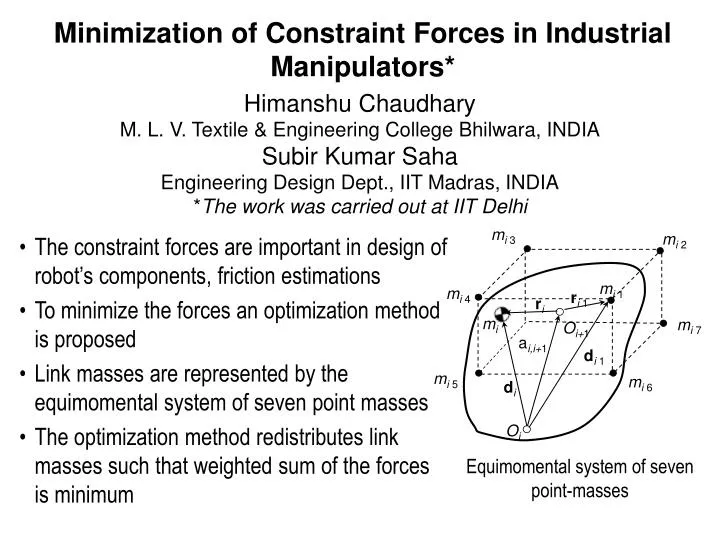
mi 3 mi 2 mi 1 mi 4 ri 1 ri mi mi 7 Oi+1 ai,i+1 di 1 mi 5 mi 6 di Oi Minimization of Constraint Forces in Industrial Manipulators* Himanshu ChaudharyM. L. V. Textile & Engineering College Bhilwara, INDIASubir Kumar SahaEngineering Design Dept., IIT Madras, INDIA *The work was carried out at IIT Delhi • The constraint forces are important in design of robot’s components, friction estimations • To minimize the forces an optimization method is proposed • Link masses are represented by the equimomental system of seven point masses • The optimization method redistributes link masses such that weighted sum of the forces is minimum Equimomental system of seven point-masses