Download
1 / 18
180 likes | 494 Views
MASINAELEMENTIDE ja PEENMEHAANIKA ÕPPETOOL. TUGEVUSÕPETUS. PINGEKONTSENTRATSIOON: Vääne. 1. Ülesande püstitus ja algandmed. 60. 40. M. R ?. M. Astmega ümarvõll. Arvutada väänatud varda vähim võimalik üleminekuraadius R !.

E N D
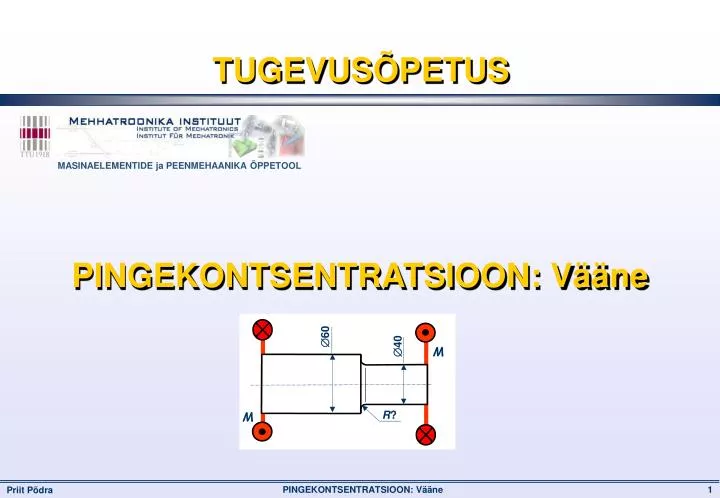
MASINAELEMENTIDE ja PEENMEHAANIKA ÕPPETOOL TUGEVUSÕPETUS PINGEKONTSENTRATSIOON: Vääne PINGEKONTSENTRATSIOON: Vääne
60 40 M R? M Astmega ümarvõll Arvutada väänatud varda vähim võimalik üleminekuraadius R! Arvestama peab detaili geomeetria muutustest tulenevat pingekontsentratsiooni Väänav koormus: M = 1000 Nm Materjali voolepiir tõmbel: sy = 800 MPa Nõutav varutegur: [S] = 4 PINGEKONTSENTRATSIOON: Vääne
60 40 M R? M 2.1. Lubatav pingekontsentratsioonitegur (1) Ühtlaselt väänatud võll D1 Detail on ühtlaselt väänatud Kõikide ristlõigete sisejõud R Astme tugevustingimus Materjali voolepiir väändel Astme kohalik pinge Nõutav varutegur Astme pingekontsentratsioonitegur väändel Astme vähim läbimõõt Astme nimipinge PINGEKONTSENTRATSIOON: Vääne
60 40 M R? M 2.1. Lubatav pingekontsentratsioonitegur (2) Ühtlaselt väänatud võll Astme tugevustingimus D2 D1 R Materjali voolepiir väändel Empiiriline seos tõmbeja väände voolepiiride vahel Üleminekuraadiuse R väärtuse valikul tuleb tagada, et pingekontsentratsiooniteguri väärtus ei ole suurem, kui K = 1,41 PINGEKONTSENTRATSIOON: Vääne
2.2. Astme pingekontsentratsioonitegur (1) Antud detaili kuju jaoks Pingekontsentratsioonitegurite väärtused saadakse käsiraamatutest Antud pingekontsetraatori kuju jaoks Antud tööseisundi jaoks PINGEKONTSENTRATSIOON: Vääne
2.2. Astme pingekontsentratsioonitegur (2) Detaili kuju = SILINDER Pingekontsentraatori kuju = ASTE Astmega silindri vääne Tööseisund = VÄÄNE Olulised muutujad Kontsentratsiooniteguri kasutamise viis PINGEKONTSENTRATSIOON: Vääne
1,41 0,082 0,095 3.1. Vähim lubatav üleminekuraadius (1) Graafik d/D = 0,67 puudub Oluline muutuja Siin tuleb kasutada interpoleerimist Kui , siis Kui , siis PINGEKONTSENTRATSIOON: Vääne
3.1. Vähim lubatav üleminekuraadius (2) Lineaarse interpoleerimise skeem R/D1 0,095 R/D1 0,082 Suhteline raadius 0,6 d/D 0,8 0,67 Üleminekuraadiuse vähim lubatav väärtus Mida järsem on geomeetria muutus, seda suurem on pingekontsentratsioon PINGEKONTSENTRATSIOON: Vääne
60 40 M R3,6 M 3.2. Tugevuskontroll -- ühtlased lõigud Peenema osa ristlõigete suurim väändepinge Tugevusvarutegur Tugevusvarutegur Jämedama osa ristlõigete suurim väändepinge Ühtlase ristlõikega osade tugevus on tagatud PINGEKONTSENTRATSIOON: Vääne
3.3. Tugevuskontroll -- aste (1) Olulised muutujad Graafik d/D = 0,67 puudub 1,42 1,38 Siin tuleb kasutada interpoleerimist Pingekontsentratsioonitegurid Kui , siis Kui , siis 0,09 PINGEKONTSENTRATSIOON: Vääne
3.3. Tugevuskontroll -- aste (2) Lineaarse interpoleerimise skeem K 1,42 K 1,38 0,6 d/D 0,8 0,67 Pingekontsentratsioonitegur Silindrilisele astmele väändel PINGEKONTSENTRATSIOON: Vääne
3.3. Tugevuskontroll -- aste (3) Astme suurim kohalik väändepinge Tugevusvarutegur Astme tugevus on tagatud Tugevusvaru suurendamiseks tuleks raadiuse R väärtust suurendada PINGEKONTSENTRATSIOON: Vääne
60 40 M 60 40 R3,6 M R3,6 113 80 24 tmaxMPa Astmega võll Astme suurim lubatud üleminekuraadius on 3,6 mm PINGEKONTSENTRATSIOON: Vääne
t t t MPa MPa MPa 24 113 60 40 24 113 Ristlõigete pinged Peenema osa ristlõiked 80 40 80 Jämedama osa ristlõiked Astmega ristlõige PINGEKONTSENTRATSIOON: Vääne