Download
1 / 23
230 likes | 247 Views
Explore kinematics in robotics without considering the forces behind it. Learn direct and inverse kinematics, frames, and Denavit-Hartenberg notation used in manipulators. Study link connections, end effectors, and axis descriptions.

E N D
Manipulator KinematicsTreatment of motion without regard to the forces that cause it. Contents of lecture: Resume Direct kinematics Denavit-Hartenberg notation Standard Frames Inverse Kinematics (lightly)
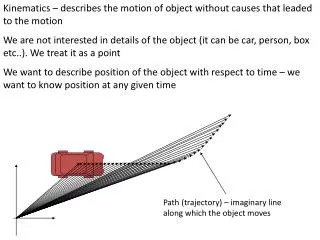
Description of position and orientation Location of objects: • Links of manipulator, Parts, Tools Specified by: • frame, coordinate systems
z0 {A} y0 y1 x1 x0 z1 {B} Description of a Frame • Frame: set of four vectors giving position + orientation • Description of a frame: position + rotation matrix • position: frame with identity as rotation • orientation: frame with zero position
BP AP XB ZA ZB APBORG YB YA XA Homogeneous Transformation Matrix Replace by the more appealing equation: {A} A row added here A “1” added here
Compound Transformation If {C} is known relative to {B}, and {B} is known relative to {A}. We want to transform P from {C} to {A}:
Where is my hand? Direct Kinematics Direct Kinematics: HERE!
Serial and Parallel Manipulators PUMA560 Hexapod
Links Joints: Links and Joints End Effector Robot Basis
Axis i Axis i-1 Link description:link length and link twist ai-1 i-1
Axis i-1 ai-1 i-1 Link connections:link offset, joint angle Axis i ai di Link i i
Axis i-1 ai-1 i-1 Denavit-Hartenberg Parameters Axis i ai di Link i i
Affixing frames to links 1) Identify the joint axes and draw lines along them. For step 2 through 5 below consider two of these neighboring lines: 2) Identify the common perpendicular between them, or point of intersection. At the point of intersection, or at the point where the common perpendicular meets the ith axis, assign the link frame origin. 3) Assign Zi pointing along the direction of axis i. 4) Assign Xi pointing along the common perpendicular, or if the axes intersect, assign Xi to be normal to the plane containing the two axes. 5) Assign Yi to complete a right-hand coordinate system. 6) Assign {0} to match {1} when the joint variable is zero. For {N} choose an origin location and XN direction freely, but generally so as to cause as many link parameters as possible to become zero.
Denavit Hartenberg Parameters ai = the distance from Zi to Zi+1 measured along Xi i = the angle between Zi to Zi+1 measured about Xi di = the distance from Xi-1 to Xi measured along Zi i = the angle between Xi-1 to Xi measured about Zi
Axis i Axis i-1 di ai-1 i-1 Link Transformation i
Inverse Kinematics How do I put my hand here? IK: Choose these angles!
Why is IK hard? - May have more than one solution or none at all • Amounts to solving nonlinear equations (can be hard) 2 solutions!
Inverse kinematics Multiple solutions • Closest solution • Obstacles • Weight
Inverse Kinematics Number of solutions In general, the more non-zero link parameters there are, the more ways there will be to reach a certain goal. Number of solutions vs. nonzero ai for manipulator with 6 rotational joints
Opgaver • CRAIG: • 3.3 • 3.8 • 3.9 • 3.16 • Model Reis Robot