Download
1 / 25
250 likes | 354 Views
An Automated Segmentation Method for Microarray Image Analysis. Wei-Bang Chen 1 , Chengcui Zhang 1 and Wen-Lin Liu 2 1 Department of Computer and Information Sciences 2 Dept. of Management, Marketing, and Industrial Distribution University of Alabama at Birmingham March 17, 2006.

E N D
An Automated Segmentation Method for Microarray Image Analysis Wei-Bang Chen1, Chengcui Zhang1 and Wen-Lin Liu2 1Department of Computer and Information Sciences 2Dept. of Management, Marketing, and Industrial Distribution University of Alabama at Birmingham March 17, 2006
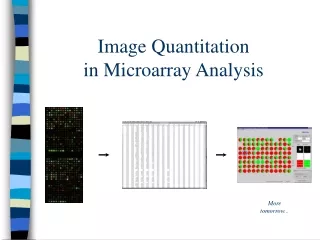
What is microarray? • DNA microarray was introduced in 1999 by Patrick Brown and Vishwanath Iyer.[1] • Microarray allows biologists to monitor gene expression level in parallel. [1] V. R. Iyer, et al. "The transcriptional program in the response of human fibroblasts to serum," Science, v283, pp. 83-7, 1999.
Problems and motivations • Uneven background a result of improper counterstain • Inner holes (a donut, comet, or overlap) manufacturing quality of the slide. • ScratchTouching the spots area accidentally • NoisesInadequate washing
Three-step approach • Background identification and noise removal • Background identification • Noise removal • Fully automatic gridding • Spot segmentation
Three-step approach • Background identification and noise removal • Background identification • Noise removal • Fully automatic gridding • Spot segmentation
Step 1.1 Background identification To deal with the uneven background problem, we firstly divide the entire slide into small areas.
Step 1.1 Background identification For global threshold, we use the matrix of mean values of all pixel intensities in the small area to represent the slide.
Step 1.1 Background identification For local threshold, we find the minimum intensity values of each row and columns
Three-step approach • Background identification and noise removal • Fully automatic gridding • Finding margins • Detecting blocks • Gridding • Spot segmentation
Three-step approach • Background identification and noise removal • Fully automatic gridding • Spot segmentation
Step 3 Spot segmentation To minimize the intra class, we want to find a threshold th to maximize the follow formula where, N is the total number of pixels which pre-labeled as signals Nthis the number of pixels in the white class (>th) mb is the mean of the ‘black’ class mw is the mean of the ‘white’ class
Step 3 Spot segmentation • Nth = N All pixels pre-labeled as ‘foreground’ are real signals. • Nth < N Part of the ‘foreground’ pixels belong to noise, inner holes, or outer rims. • (Nth / N) ≤ φ Pixels identified as white are considered as noise • (Nth / N) > φ Only pixels in the ‘white’ class is considered as real signals
Before applying background removal and noise elimination method • After applying background removal and noise elimination method Experimental results Background removal and Noise elimination
Experimental results Segmentation results
Experimental results • Block boundary detection and gridding results • Block boundary detection • 5 slides (48blocks for each slide) • Recall value: 93% • Precision value: 100% • Gridding • 1 slide (48 blocks) • Recall value: 99.97% • Precision value: 100%
Experimental results Segmentation results
Conclusions • Our proposed method is a fully automatic and highly parallelizable method • Handle uneven background and severe noise • Detect block boundaries • Generate grids • Extract spots simply and effectively • Highly parallelizable method