Download
1 / 21
220 likes | 494 Views
A seminar on Design of adjustable stiffness spring. CONTENTS. Why use Adjustable stiffness springs ? Introduction Mechanism Mathematical Modeling Experimental Results Conclusion References. WHY USE ADJUSTABLE STIFFNESS SPRINGS?. > (for isolation) If W is low, so

E N D
CONTENTS • Why use Adjustable stiffness springs ? • Introduction • Mechanism • Mathematical Modeling • Experimental Results • Conclusion • References
WHY USE ADJUSTABLE STIFFNESS SPRINGS? > (for isolation) If W is low, so Wn should lower than W, But Wn = Mass m is fixed so we have to decrease k , Xstatic = For a low value of k, Xstatic is very large which is not practicable , so we use adjustable stiffness springs according to the requirement.
In Industrial activities where robots are used; • Reducing the stiffness protects the robot against possible impacts with humans, facilitates dexterous tasks such as polishing or peg-in-hole, etc. • Low compliance deteriorates the robot’s accuracy and load capacity and makes control more difficult. A robot able to adapt its stiffness according to the type of task or movement could maintain the advantages of both stiff manipulators and safe-dexterous compliant ones.
INTRODUCTION • Variable stiffness actuators work on three principal technologies: • Electro-active polymers (EAPs) • Pneumatic artificial Muscles • Adjustable-stiffness elastic elements. • Here we will focus only on adjustable stiffness elastic elements. • Adjustable-stiffness elastic elements, consists an elastic passive element whose stiffness can be adjusted. Above image from www.mech.vub.ac.be
INTRODUCTION • An adjustable-stiffness spring has two non-linear springs clamped at each end. • The global stiffness of the system can be adjusted by modifying the shape of the these springs. 1 & 2 - Bars where force is applied. 3 - Elastic element.
Mechanism 1. & 2. Bars 5. C shaped element Leaf spring 6. Rollers Screw 7. Electric motor
Mechanism If δ < δ’ then ΔX > ΔX’, for the same force F.
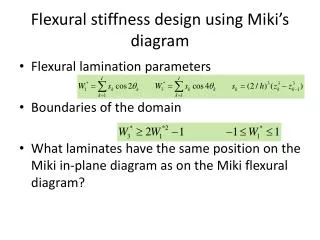
Mathematical modeling • For a fixed roller position given by the aspect ratio α = The deformed shape y(x) for the leaf spring is given by the solution of the following non-linear differential equation. [ from the equation of curvature]
Mathematical modeling Where and are both the horizontal and vertical distance between the extremes of the leaf spring, and the term EI is the flexural stiffness.
Mathematical modeling • The solution of the nonlinear differential equation is.. where the parameter a is obtained by imposing that y( ) = 0, that is, a is numerically computed from the integral equation ..
Mathematical modeling Once the deformed shapes have been obtained, the stored energy in one leaf spring is numerically computed through the expression Therefore, the horizontal force in one leaf spring is obtained from the first derivative of the potential energy, i.e.
Mathematical modeling Assume a spring displacement where xf is the new horizontal position of the right extreme for a given load. Now considering all of the four leaf springs working together, the global or equivalent force of the actuator is obtained as.. and the global stiffness as.. for a fixed value of α.
Mechanical behaviour of a leaf spring versus aspect ratio for a fixed value of yf =40.5mm
EXPERIMENTAL RESULTS • Experiments were performed for different aspect ratios of the leaf spring. • For α=3.5 ( δ =60 ×10−3 m) to α=2.0 (δ = 180×10−3m), that allows us to obtain a stiffness value k between 1000 N/m and 16,000 N/m. • As a result of the experimental test, force versus displacement values were obtained.
EXPERIMENTAL RESULTS For α = 3.5 For α = 3.25 For α = 3.0
For α = 2.75 For α = 2.5
CONCLUSION • This seminar proposes a new model of an adjustable-stiffness spring. • The proposed device has four leaf springs with non-linear elastic deformations. • The geometry of the leaf spring can be modified by means of an electric motor that adjusts the stiffness of the spring to the desired value. • The most important characteristic is its large stiffness range (with variations greater than 1500%), and its scalability for working with very high and very low loads. • These characteristics allow the spring to be used for different purposes, like robotics, automotive engineering etc.
REFERENCES • Design of an adjustable-stiffness spring: Mathematical modeling and simulation, fabrication and experimental validation by A. GonzálezRodríguez , J.M. Chacón, A. Donoso, A.G. GonzálezRodríguez. • A variable stiffness vibration absorber for minimization of transient vibrations P. L. Walsh and j. S. Lamancusa. Department of Mechanical Engineering, The Pennsylvania State University, University Park, Pennsylvania 16802, U.S.A. • Engineering Mechanics of solid by EGOR. P. POPOV, Prentice hall publication,2002.