Download
1 / 1
10 likes | 105 Views
Introduction

E N D
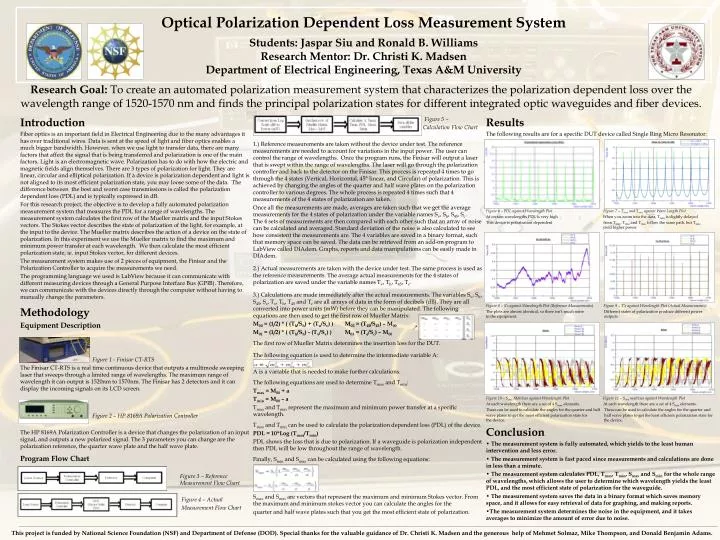
Introduction Fiber optics is an important field in Electrical Engineering due to the many advantages it has over traditional wires. Data is sent at the speed of light and fiber optics enables a much bigger bandwidth. However, when we use light to transfer data, there are many factors that affect the signal that is being transferred and polarization is one of the main factors. Light is an electromagnetic wave. Polarization has to do with how the electric and magnetic fields align themselves. There are 3 types of polarization for light. They are linear, circular and elliptical polarization. If a device is polarization dependent and light is not aligned to its most efficient polarization state, you may loose some of the data. The difference between the best and worst case transmissions is called the polarization dependent loss (PDL) and is typically expressed in dB. For this research project, the objective is to develop a fully automated polarization measurement system that measures the PDL for a range of wavelengths. The measurement system calculates the first row of the Mueller matrix and the input Stokes vectors. The Stokes vector describes the state of polarization of the light, for example, at the input to the device. The Mueller matrix describes the action of a device on the state of polarization. In this experiment we use the Mueller matrix to find the maximum and minimum power transfer at each wavelength. We then calculate the most efficient polarization state, ie. input Stokes vector, for different devices. The measurement system makes use of 2 pieces of equipment, the Finisar and the Polarization Controller to acquire the measurements we need. The programming language we used is LabView because it can communicate with different measuring devices through a General Purpose Interface Bus (GPIB). Therefore, we can communicate with the devices directly through the computer without having to manually change the parameters. Methodology Equipment Description Figure 1 - Finisar CT-RTS The Finisar CT-RTS is a real time continuous device that outputs a multimode sweeping laser that sweeps through a limited range of wavelengths. The maximum range of wavelength it can output is 1520nm to 1570nm. The Finisar has 2 detectors and it can display the incoming signals on its LCD screen. Figure 2 – HP 8169A Polarization Controller The HP 8169A Polarization Controller is a device that changes the polarization of an input signal, and outputs a new polarized signal. The 3 parameters you can change are the polarization reference, the quarter wave plate and the half wave plate. Program Flow Chart Figure 3 – Reference Measurement Flow Chart Figure 4 – Actual Measurement Flow Chart Figure 5 – Calculation Flow Chart 1.)Reference measurements are taken without the device under test. The reference measurements are needed to account for variations in the input power. The user can control the range of wavelengths. Once the program runs, the Finisar will output a laser that is swept within the range of wavelengths. The laser will go through the polarization controller and back to the detector on the Finisar. This process is repeated 4 times to go through the 4 states (Vertical, Horizontal, 45° linear, and Circular) of polarization. This is achieved by changing the angles of the quarter and half wave plates on the polarization controller to various degrees. The whole process is repeated 4 times such that 4 measurements of the 4 states of polarization are taken. Once all the measurements are made, averages are taken such that we get the average measurements for the 4 states of polarization under the variable names Sv, Sh, S45, Sc.The 4 sets of measurements are then compared with each other such that an array of noise can be calculated and averaged. Standard deviation of the noise is also calculated to see how consistent the measurements are. The 4 variables are saved in a binary format, such that memory space can be saved. The data can be retrieved from an add-on program to LabView called DIAdem. Graphs, reports and data manipulations can be easily made in DIAdem. 2.) Actual measurements are taken with the device under test. The same process is used as the reference measurements. The average actual measurements for the 4 states of polarization are saved under the variable names Tv, Th, T45, Tc. 3.) Calculations are made immediately after the actual measurements. The variables Sv, Sh, S45, Sc, Tv, Th, T45 and Tc are all arrays of data in the form of decibels (dB). They are all converted into power units (mW) before they can be manipulated. The following equations are then used to get the first row of Mueller Matrix: M00 = (1/2) * ( (Th/Sh) + (Tv/Sv) ) M02 = (T45/S45) – M00 M01 = (1/2) * ( (Th/Sh) - (Tv/Sv) ) M03 = (Tc/Sc) – M00 The first row of Mueller Matrix determines the insertion loss for the DUT. The following equation is used to determine the intermediate variable A: A is a variable that is needed to make further calculations. The following equations are used to determine Tmax and Tmin: Tmax = M00 + a Tmin = M00 – a Tmax and Tmin represent the maximum and minimum power transfer at a specific wavelength. Tmax and Tmin can be used to calculate the polarization dependent loss (PDL) of the device. PDL = 10*Log (Tmax/Tmin) PDL shows the loss that is due to polarization. If a waveguide is polarization independent then PDL will be low throughout the range of wavelength. Finally, Smin and Smax can be calculated using the following equations: Smax and Smin are vectors that represent the maximum and minimum Stokes vector. From the maximum and minimum stokes vector you can calculate the angles for the quarter and half wave plates such that you get the most efficient state of polarization. Results The following results are for a specific DUT device called Single Ring Micro Resonator: Figure 6 – PDL against Wavelength Plot Figure 7 – Tmax and Tmin against Wave Length Plot At certain wavelengths PDL is very high When you zoom into the data, Tmin is slightly delayed This device is polarization dependent from Tmax. Tmin and Tmax follow the same path, but Tmax yield higher power Figure 8 – S’s against Wavelength Plot (Reference Measurements) Figure 9 – T’s against Wavelength Plot (Actual Measurements) The plots are almost identical, so there isn’t much noise Different states of polarization produce different power in the equipment. outputs. Figure 10 – Smax Matrixes against Wavelength Plot Figure 11 – Smin matrixes against Wavelength Plot At each wavelength there are a set of 4 Smax elements. At each wavelength there are a set of 4 Smin elements. These can be used to calculate the angles for the quarter and half These can be used to calculate the angles for the quarter and wave plates to get the most efficient polarization state for half wave plates to get the least efficient polarization state for the device. the device. Conclusion • The measurement system is fully automated, which yields to the least human intervention and less error. • The measurement system is fast paced since measurements and calculations are done in less than a minute. • The measurement system calculates PDL, Tmax, Tmin, Smax and Smin for the whole range of wavelengths, which allows the user to determine which wavelength yields the least PDL, and the most efficient state of polarization for the waveguide. • The measurement system saves the data in a binary format which saves memory space, and it allows for easy retrieval of data for graphing, and making reports. • The measurement system determines the noise in the equipment, and it takes averages to minimize the amount of error due to noise. Optical Polarization Dependent Loss Measurement SystemStudents: Jaspar Siu and Ronald B. WilliamsResearch Mentor: Dr. Christi K. MadsenDepartment of Electrical Engineering, Texas A&M University Research Goal:To create an automated polarization measurement system that characterizes the polarization dependent loss over the wavelength range of 1520-1570 nm and finds the principal polarization states for different integrated optic waveguides and fiber devices. This project is funded by National Science Foundation (NSF) and Department of Defense (DOD). Special thanks for the valuable guidance of Dr. Christi K. Madsen and the generous help of Mehmet Solmaz, Mike Thompson, and Donald Benjamin Adams.