Download
1 / 46
460 likes | 477 Views
Basic 3D Concepts. Basic 3D Concepts. Overview Coordinate systems Transformations Projection Rasterization. Establishing a coordinate system. Representing the 3D world. Typically, objects in our world consist of groups of triangles.

E N D
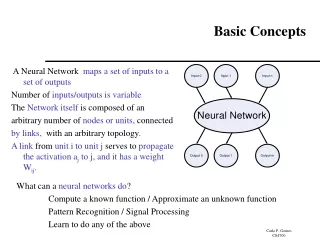
Basic 3D Concepts Overview • Coordinate systems • Transformations • Projection • Rasterization
Representing the 3D world • Typically, objects in our world consist of groups of triangles. • face = set of one or more contiguous coplanar adjacent triangles. • adjacency? • How do we represent triangles?
Representing the 3D world • How do we represent triangles? • By 3 points - the 3 vertices of the triangle. • How are the points represented?
Representing the 3D world • How are the points represented? • Since we are in 3D space, each point is a vector consisting of 3 values, <x,y,z>, in a cartesian coordinate system. (scalar, vector, matrix) 2D 3D
Representing the 3D world • In TorqueScript, a vector is represented by a list/string of (typically) 3 numbers separated by a space. • Example $fred = “12.0 13 19”; $c0 = getword( $fred, 0 ); echo( $c0 ); //what does this print?
Representing the 3D world • Unity, uses the Vector3 class. • example (JavaScript) var aPosition = Vector3(1, 1, 1); • example (C#) using UnityEngine; using System.Collections; public class example : MonoBehaviour { public Vector3 aPosition = new Vector3( 1, 1, 1 ); }
Unity’s Vector3 class • This structure is used throughout Unity to represent D positions and directions. • It also contains functions for doing common vector operations. • See http://unity3d.com/support/documentation/ScriptReference/Vector3.html for more information.
Unity’s Vector3 class • class variables: • one, zero, forward, up, right • instance variables: • x, y, z • methods: • scale, normalize, cross, dot, reflect, distance, etc. • operators: • +, -, *, /, ==, !=
Representing the 3D world • How does a vector such as “12.0 1 -5” map into the “real” world? • We don’t (yet) know if 1 above specifies the H, W, or D! • Furthermore, we don’t know the relationship (l or r, u or d, f or b) between “12.0 1 -5” and “12.0 2 -5”
Representing the 3D world • How does a vector map into the “real” world? • Let’s establish a coordinate system • Left is left-handed; right is right-handed. • Index is +z, thumb is +y, middle is +x.
Representing objects • Objects (models) are composed of polygons which are composed of triangles. • But these triangles aren’t arbitrary!
Representing objects • Objects (models) are composed of polygons which are composed of triangles. • But these triangles aren’t arbitrary!
Representing the 3D world • We don’t know where our object will be placed in the world. • It may even move in the world! • We may have more than one in the world too! • So we don’t/can’t fix the object coordinates in terms of world coordinates! • But we need to specify each of the triangle vertices as numbers. • So what can we do?
Representing the 3D world • So we don’t/can’t fix the object coordinates in terms of world coordinates! • But we need to specify each of the triangle vertices as numbers. • So what can we do? • Each object has it’s own object coordinate system with it’s own origin (0,0,0). • So where is the model origin?
Representing the 3D world • Each object has it’s own object coordinate system with it’s own origin (0,0,0). • So where is the model origin? • Anywhere! It can be any point on (or not on) the object. • It can be the left-most (or right-most or top-most or …) point on the object. • It can be the geometric center (centroid/center of mass) of the object.
Representing the 3D world • Typically, it is the geometric center (centroid/center of mass) of the object. • Let P be the set of points in the object. • Let Pi=<xi,yi,zi> be a particular point. • How can we calculate the centroid of an object?
Representing the 3D world • Typically, it is the geometric center (centroid/center of mass) of the object. • Let P be the set of points in the object. • Let Pi=<xi,yi,zi> be a particular point. • How can we calculate the centroid of an object?
Representing the 3D world • Interesting property of the centroid: • This may not even be a point on the object! • Can you think of a real world object with a center that isn’t on the object?
Transformation • Conversion from object coordinates to world coordinates. • Consists of: • Rotation • Translation • Scale
Transformation • Translation
Transformation • Scale
Transformation • Rotation
Representing the 3D world • In Unity, the Transform Component determines the actual Position, Rotation, and Scale of all objects in the scene. • Every object has a Transform.
Representing the 3D world • In Unity, … • Position • X, Y, and Z coordinates • Rotation • around the X, Y, and Z axes, measured in degrees • Scale • along X, Y, and Z axes • A value "1" is the original size (size at which the object was imported).
Representing the 3D world • In Unity, … • All properties of a Transform are measured relative to the Transform's parent. • If the Transform has no parent, the properties are measured relative to World Space.
Problem We have a 3D world consisting of height, width, and depth which is displayed on a 2D computer screen consisting only of height and width!
Projection • Remember that our world is 3D and the computer monitor is 2D. • Projection is the conversion from world coordinates to screen coordinates. • Types: • parallel (orthographic) • perspective
Parallel (orthographic) projection • The distance from the camera doesn't affect how large an object appears.
Perspective projection • The further an object is from the camera (viewpoint), the smaller it appears. • Similar to how our eye and how a camera works.
Controlling perspective projection In both scenes, the fence appears to be relatively close, but the mountains vary greatly.
Rendering (rasterization) • But that’s not all there is to do! • All we’ve done so far is to project the vertices of triangles onto the screen. • What about the points in between (the vertices)? • What about color? • What about light sources?
Rendering (rasterization) • The process of converting the 3D model of an object into an on-screen 2D image. • Note: This is most often done by the video card hardware for speed.
Rendering examples Note uniformity across face of triangle.
Rendering Steps: • transformation • projection • scan conversion (filling in the triangles) • involves shading the surface (considers the orientation of the surface w.r.t. the location of the light(s))
Rendering • Typically involves a z-buffer (because many points may be projected to the same point on the screen).