Download
1 / 20
200 likes | 224 Views
Explore artificial physics through AIBO robots and Pyro programming; test control accuracy and effectiveness. Details key procedures and materials used, with conclusion and reflections on the project's outcomes.

E N D
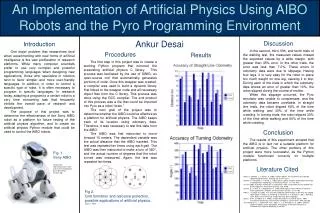
Ankur Desai December 7, 2006 An Implementation of Artificial Physics Using AIBO Robots and the Pyro Programming Environment
4555 Overlook Ave., SW Washington, DC 20375 Naval Research Laboratories Artificial Intelligence Center
Mitchell A. Potter, Ph.D. • Principal Investigator • Evolutionary Robotics • Coevolutionary Models • Representation Issues • Continuous and Embedded Learning
Adaptive Systems Team • Shared lab space • Variety of robotic equipment • No wireless communications • Upcoming anniversary demonstration
Rationale • Divide tasks between multiple robots • Based on natural behaviors • Unified platforms
Purpose • Determine whether AIBO is an effective platform for artificial physics • Create Python module to control the AIBO robots
Artificial Physics • Developed by Spears and Gordon in 1999 • Each robot treated as a molecule • Gravitational forces simulated
Artificial Physics • Grid formation Resource protection
Python Robotics • Interpreted language • Platform-blind • High-level control
Testing Design • Straight line accuracy • Turning accuracy • Correct functioning of simulation • No testing necessary
Materials • Software • SWIG • Tekkotsu • Pyro • Seven AIBO robots
Procedures – Python module • Build C library object files • Create SWIG wrapper • Compile wrapper into dynamic library
Procedures – Odometry • Setup • Place AIBO in empty room • Connect to host computer • Send command • Walk 10 meters • Turn 360° • Measure actual motion
Conclusion • Python module successful • AIBO is not a suitable platform • Alternate localization techniques • Use of different robotic models
Reflections • Overall positive experience • Delayed security clearance • Limited wireless access • Difficult commute
Acknowledgments • I would like to thank the Adaptive Systems team at Naval Research Laboratories Artificial Intelligence Center, especially Mitchell Potter and R. Paul Wiegand, for their guidance and support throughout this project.
Literature Cited • Blank, D., Meeden, L., & Kumar, D. (2003). Python robotics: An environment for exploring robotics beyond LEGOs. SIGSCE ’03, 35, 317-3121. • Ikemoto, Y., Hasegawa, Y., Fukuda, T., & Matsuda, K. (2005). Gradual spatial pattern formation of homogeneous robot group. Information Sciences, 171, 431-445. • Lee, M. (2003). Evolution of behaviors in autonomous robot using artificial neural network and genetic algorithm. Information Sciences, 155, 43-60. • Oliveira, E., Fischer, K., & Stepankova, O. (1999). Multi-agent systems: Which research for which applications. Robotics and Autonomous Systems, 27, 91- 106. • Röfer, T., & Jüngel, M. (2003). Fast and robust edge-based localization in the Sony four-legged robot league. In Polani, D., Browning, B., Bonarini, A., & Yoshida, K. (Eds.), RoboCup 2003: Robot soccer world cup VII (pp. 262-273). Berlin: Springer. • Spears, W. M., & Gordon, D. F. (1999). Using artificial physics to control agents. 1999International Conference on Information Intelligence and Systems, 1999, 281- 288. • Tira-Thompson, E. J., Halelamien, N. S., Wales, J. J., & Touretzky, D. S. (2004). Tekkotsu: Cognitive robotics on the Sony AIBO. Proceedings of the Sixth International Conference on Cognitive Modeling, 6, 390-391.