Download
1 / 1
10 likes | 137 Views
Energy-Saving Conflict Resolution in Wireless Ad-Hoc Networks. Yalin Evren Sagduyu / Anthony Ephremides. Objective, Motivation and Approach * Objective: Analysis of collision resolution (CR) problem for wireless networks from energy-efficiency perspective

E N D
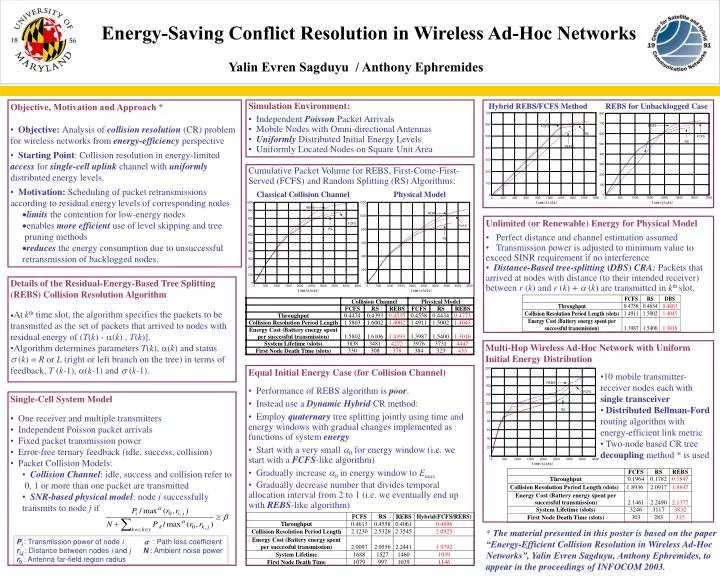
Energy-Saving Conflict Resolution in Wireless Ad-Hoc Networks Yalin Evren Sagduyu / Anthony Ephremides • Objective, Motivation and Approach * • Objective: Analysis of collision resolution (CR) problem • for wireless networks from energy-efficiency perspective • Starting Point: Collision resolution in energy-limited • accessfor single-celluplink channel with uniformly • distributed energy levels. • Motivation: Scheduling of packet retransmissions according to residual energy levels of corresponding nodes • limits the contention for low-energy nodes • enables more efficient use of level skipping and tree pruning methods • reduces the energy consumption due to unsuccessful retransmission of backlogged nodes. • Simulation Environment: • Independent Poisson Packet Arrivals • Mobile Nodes with Omni-directional Antennas • Uniformly Distributed Initial Energy Levels • Uniformly Located Nodes on Square Unit Area Hybrid REBS/FCFS Method REBS for Unbacklogged Case Cumulative Packet Volume for REBS, First-Come-First-Served (FCFS) and Random Splitting (RS) Algorithms: Classical Collision Channel Physical Model time(slots) time(slots) • Unlimited (or Renewable) Energy for Physical Model • Perfect distance and channel estimation assumed • Transmission power is adjusted to minimum value to exceed SINR requirement if no interference • Distance-Based tree-splitting (DBS) CRA: Packets that arrived at nodes with distance (to their intended receiver) between r (k)and r (k) + (k) are transmitted in kth slot. • Details of the Residual-Energy-Based Tree Splitting • (REBS) Collision Resolution Algorithm • Atkth time slot, the algorithm specifies the packets to be transmitted as the set of packets that arrived to nodes with residual energy of (T(k) - (k) , T(k)]. • Algorithm determines parameters T(k), (k) and status • (k) = R or L (right or left branch on the tree) in terms of feedback, T (k-1), (k-1) and (k-1). time(slots) time(slots) • Multi-Hop Wireless Ad-Hoc Network with Uniform Initial Energy Distribution • Equal Initial Energy Case (for Collision Channel) • Performance of REBS algorithm is poor. • Instead usea DynamicHybrid CR method: • Employ quaternary tree splitting jointly using time and energy windows with gradual changes implemented as functions of system energy • Start with a very small 0 for energy window (i.e. we start with a FCFS-likealgorithm) • Gradually increase 0 in energy window to Emax • Gradually decrease number that divides temporal allocation interval from 2 to 1 (i.e. we eventually end up with REBS-likealgorithm) • 10 mobile transmitter- • receiver nodes each with • single transceiver • Distributed Bellman-Ford routing algorithm with • energy-efficient link metric • Two-node based CR tree decoupling method * is used • Single-Cell System Model • One receiver and multiple transmitters • Independent Poisson packet arrivals • Fixed packet transmission power • Error-free ternary feedback (idle, success, collision) • Packet Collision Models: • Collision Channel: idle, success and collision refer to • 0, 1 or more than one packet are transmitted • SNR-based physical model: node i successfully transmits to node j if time(slots) * The material presented in this poster is based on the paper “Energy-Efficient Collision Resolution in Wireless Ad-Hoc Networks”, Yalin Evren Sagduyu, Anthony Ephremides, to appear in the proceedings of INFOCOM 2003. Pi : Transmission power of node i : Path loss coefficient ri,j: Distance between nodes i and j N: Ambient noise power r0 : Antenna far-field region radius