Download
1 / 64
650 likes | 869 Views
ME176: ( Space! ) Machine Design ADCS Design & Hardware February 20th, 2003. Aaron Rogers aaron.rogers@aeroastro.com. Introductions and Overview. Review of Last Section: Orbits. Review of Last Section: Orbits Cont. d. e. s. c. e. n. d. i. n. g. s. a. t. e. l. l. i. t. e.

E N D
ME176: (Space!) Machine Design ADCS Design & Hardware February 20th, 2003 Aaron Rogers aaron.rogers@aeroastro.com ME176: Lecture 5
Introductions and Overview ME176: Lecture 5
Review of Last Section: Orbits ME176: Lecture 5
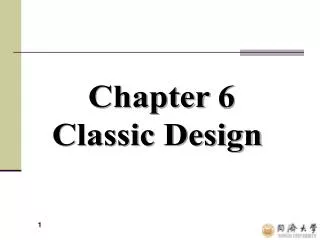
Review of Last Section: Orbits Cont. d e s c e n d i n g s a t e l l i t e ' s n o d e p o s i t i o n a t e p o c h w = a r g u m e n t o f p e r i g e e = true anomaly at epoch line of nodes r = p e r i g e e r a d i u s p r = a p o g e e r a d i u s a r a = s e m i - m a j o r a x i s = ( r + r ) / 2 o a p e = e c c e n t r i c i t y = ( r - r ) / ( r + r ) a p a p r p r a w E a r t h a s c e n d i n g n o d e G N C - 0 7 9 ME176: Lecture 5
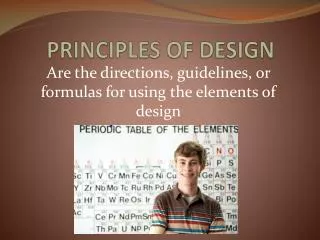
DV1 @ T0: Initiate Transfer Orbit DV2 @ TF: Circularize Into Target Orbit At T0=0 min, R' = RD + DR where RD=1.5km (nom. baseline), DR > 300km (20% baseline) R' At TF~95 min, R' = RD T~ 24 min T~ 71 min Transfer Orbit: Apogee Alt=500km – dAlt Review of Last Section: Hohmann Transfer ME176: Lecture 5
Commercial Satellites at GEO ME176: Lecture 5
(Re) Orientation • 7 - Radio & Comms • 8 - Thermal / Mechanical Design. FEA • 9 - Reliability • 10 - Digital & Software • 11 - Project Management Cost / Schedule • 12 - Getting Designs Done • 13 - Design Presentations • 1 - Introduction • 2 - Propulsion & ∆V • 3 - Launch Vehicles • 4 - Orbits & Orbit Determination • 5 – Attitude Determination and Control Sys. Design & Hardware • Coordinate Frames • Attitude Determination • Environmental Disturbances • Vehicle Stabilization Methods • Attitude Control • Control System Design • Assembly, Integration & Test • Simplifying ACS • 6 - Power & Mechanisms Sporadic Events: •Mixers •Guest Speakers •Working on Designs •Teleconferencing ME176: Lecture 5
For your selected Mission: Pick two attitude control approaches that might work List the sensors and actuators necessary to implement each of them. How accurate / sensitive would each have to be? Any other special requirements ($, mass, volume, power, bandwidth etc.) Locate them on a “generic” spacecraft (e.g. a cube or faceted sphere Make a block diagram of the feedback control system you envision Pick your favorite of the two, and tell me why it’s your favorite (compare $, mass, complexity, performance…) Homework Questions for 2/27 Comments: • Eg. Gravity Gradient, Thompson Spin & TS with momentum storage are options for an earth pointer. • Also search Web to locate actual components that might be candidates - not selections, but possibilities. • ACS thrusters want to be in pairs and far from the CG. Torque coils don’t care. Sensors have to have a clear view out etc. • What is the plant, what are the sensors, what is the actuator suite? What are the “set points?” • Make a “trade table” listing specs / attributes of each to justify your selection. ME176: Lecture 5
For your Favorite of the two: List the ACS modes and the triggers to proceed from one to another. Diagram with a flow chart. Suggest a simple algorithm for your mission mode. Model it on Excel and show that it has a prayer of working List requirements your selected ACS imposes on the spacecraft List a candidate component suite and estimate the cost and labor to design, build & test. Homework Questions Cont. for 2/27 Comments: • Modes might include sleep, initial rate killer, sun or earth finder, rough point, tight point, and safe/hold. • For instance, measure an error angle or rate and actuate something to reduce that error. • For example: mass distribution, symmetry, power, siting, computation, magnetic / electromagnetic cleanliness • Assume an engineering year costs $200,000 including the tools and toys necessary to play with ACS in the lab. ME176: Lecture 5
Power: SMAD Chapter 11.4 TLOM Chapter 13, 14 Mechanisms (SMAD): Chapter 11.6 Extra ADCS Review (SMAD): Chapt. 6.2: Orbit Perturbations Chapt. 6.2: Orbit Maintenance Chapt. 11.1: ADCS Extra ADCS Review (TLOM): Chapters 6, 11 Reading Suggestions for 2/27 ME176: Lecture 5
TT&C Baseband TT&C RF Spacecraft Bus Block Diagram Electrical Power Arcjets Thermal Control Structure Solar Arrays AJTs LAE - Heat Pipes - Heaters - OSRs • Tanks • Valves • Lines Deployment Mechanisms Batteries REAs Mechanisms 70 VDC Power Regulation Unit (PRU) Propulsion Fuse Box Attitude Control Pyro Power Bus RIUs Wheels Pyro Relays Power Bus Pyro Fire Pyro Control Wheel Control MIL-STD 1553 Data Bus ESA To Payload TLM Words Accepted Commands SSA P/L RIUs UDU OBCs IMU Baseband CMD/TLM TT&C Antennas RF, CMD, TLM Ranging RF Couplers Receiver/ Transmitter ME176: Lecture 5
GN&C Coordinate Frames • Body frame • Fixed in & rotates with the spacecraft • Reference for sensor & actuator alignments • Reference for control torque calculations • Earth-Centered Inertial (ECI) frame • Constant orientation in inertial space • Used to define spacecraft & sun ephemeris for attitude determination • Orbital frame • Earth-oriented coordinate frame defines nominal attitude • Orientation in space depends on spacecraft’s orbital location • Target frame • The frame control system aligns the body frame with • Defined with commanded offsets relative to orbital frame ME176: Lecture 5
Body Frame • Coordinate system origin • Geometric center of separation plane • Xb-axis (yaw) • Perpendicular to the separation plane • Points away from the center of the spacecraft • Yb-axis (roll) • Perpendicular to the E & W panels • Points toward the east panel • Zb-axis (pitch) • Perpendicular to the north & south panels • Points toward the north panel ME176: Lecture 5
Earth-Centered Inertial (ECI) Frame • XECI • Parallel to the intersection of Earth’s equatorial plane and the ecliptic plane • Positive axis points toward the sun at the vernal equinox • ZECI • Parallel to Earth’s polar axis • Positive axis points north • YECI • Completes the right-handed triad ME176: Lecture 5
ECI Frame (Continued) ME176: Lecture 5
ECI Frame & Orbital Frame • Yaw is toward zenith (straight up from Earth) • Pitch is perpendicular to the orbit plane • Roll is perpendicular to yaw and pitch and points in the direction that the satellite is moving ME176: Lecture 5
Target Frame • During normal operations, the spacecraft body axes are controlled to the target coordinate frame • The orientation of this frame relative to the orbital frame is defined by the enabled pointing offsets • Constant • Earth-target • Fourier ME176: Lecture 5
Attitude Determination: The Problem Where am I looking in space?! ME176: Lecture 5
Attitude Determination: Magnetometers • Magnetometer measures applied magnetic field, outputs two or three magnitudes: B= [X, Y, Z]. • With known orbit model (IGRF2000) and ephemeris, can calculate attitude by comparing measured vs. expected field direction. • Low cost and low power, though does require some EMI isolation. ME176: Lecture 5
Attitude Determination: Sun Sensors ME176: Lecture 5
+ P i t c h Sunline SSA boresight E l e v a t i o n A n g l e P r o j e c t i o n o f s u n l i n e o n y a w - r o l l p l a n e A z i m u t h A n g e l SSA Mounting & Field of View ME176: Lecture 5
SSA Problems: Earth Albedo • Problem: Earth Albedo at Low Altitude • The SSA sun detection threshold is 20% of the nominal solar intensity • At low altitude, Earth albedo can be 40% as bright as the sun • Albedo can trigger a false sun-presence indication and cause erroneous sun azimuth and elevation readings • Conditions that can cause the problem: • Transfer orbit perigee altitude below 5000 km • Perigee on Earth’s sunlight side • Solution (GEO spacecraft) • Suspend use of sun sensor data when the spacecraft altitude is below 5000 km. ME176: Lecture 5
SSA Problems: Moon Interference • Problem: Moon Interference (Partial Solar Eclipse) • The SSA’s detection threshold is 20% of the nominal solar intensity • The SSA will detect the sun during a partial solar eclipse • During a partial eclipse, the centroid of the visible solar crescent is offset from the sun’s true centroid • This produces a 0.1° to 0.2 ° error in the measured sun angle • Note • The sun's visible surface has an angular diameter of 0.53 deg. as seen from Earth ME176: Lecture 5
Attitude Determination: Earth Sensors • Earth sensor assembly (ESA) provides Roll & Pitch attitude data • Used to update inertial attitude reference • Data used indirectly in a highly filtered form during normal operations • Data used directly with little filtering during Earth acquisition ME176: Lecture 5
ESA Scans With a Pitch Offset Pitch is determined from the offset between the center reference pulse and the center of the Earth. ME176: Lecture 5
ESA Scans With a Roll Offset Roll is determined from the difference between the lengths of the north and south scans across Earth. ME176: Lecture 5
ESA Problems: Multiple Targets • ESA response to this condition: • Detects two targets in the south scan • Automatically inhibits the south scan • Uses north scan for pitch angle calculations • Uses north scan and standard chord for roll angle calculations • Outputs sun presence bit = 1 (multiple targets detected) ME176: Lecture 5
ESA Problems: Non-Distinct Targets • ESA response to this condition: • Detects only one target in the south scan • Continues to use the south scan (scan is not inhibited) • Outputs erroneous pitch and roll angles • Outputs sun presence bit = 0 (only one target detected) ME176: Lecture 5
Pinhole Lens Image Processor Pattern Recognition Software Active Pixel CMOS Imager 30° Field of View StarCatalog Roll, Pitch, and YawAttitude(x, y, z) Attitude Determination: Star Trackers • Utilizes a light sensitive medium (CMOS, CCD) • Pattern recognition of detected images against internal star catalog • Acquisition, track modes • Extremely high precision (typically high cost) • Sensitive to stray light (baffles) ME176: Lecture 5
Attitude Determination: Propagation • Data output from the IMU CPU: • The sampled angular outputs developed by each gyro • The sampled acceleration outputs developed by each accelerometer • Data is typically only available during significant orbit adjust maneuvers! • Integrates linear and angular rates in order to propagate state vectors • Typically operates much faster than sensor measurements are taken • Important when attitude update is not available (e.g. no sun). ME176: Lecture 5
IMU Functional Block Diagram ME176: Lecture 5
Gyro & Accelerometer Alignments • Gyro A • Positive sense axis is in the Y-Z plane, offset 125.3 from the +Z axis • Gyros B, and C • Positive sense axes are offset 125.3 from the +Z axis • Projections of the sense axes on the X-Y plane are 60 from the +Y axis (the positive roll axis) • Gyro D • Senses rotation about the +Z axis (the positive pitch axis) • Accelerometers • Positive sense axes point in the +X direction ME176: Lecture 5
Attitude Determination Options ME176: Lecture 5
Environmental Disturbances • Atmospheric Drag (LEO) • Function of Ballistic Coefficient, Altitude • Solar radiation • Function of Surface Area, |CG – CSP| • Produces torque about all three axes • Varies with season and time of day • Payload transmissions (recoil effect) • Primarily a pitch torque Total Environmental Disturbance Torque ME176: Lecture 5
Environmental Disturbances Cont. • Geomagnetic field (compass needle effect) • Due to residual uncompensated dipole, varies with R-3 • Primarily a yaw and roll disturbance • Pitch torque produced only when solar storms temporarily distort the geomagnetic field • Gravity Gradient (LEO) • Due to asymmetric mass distribution • Torques about pitch and roll axes • Function off-nadir angle (theta), R-3 • Thermal radiation (recoil effect) • A function of the heat radiated from various spacecraft surfaces Geomagnetic Torque Gravity Gradient Torque ME176: Lecture 5
Environmental Disturbances Cont. • Solar wind (flow of charged particles) • Very small effect • Earth’s magnetosphere deflects the solar wind before it strikes the spacecraft • Force can increase temporarily (for a few hours) during strong solar storms that distort the magnetosphere • Worst-case is still a small effect • Micrometeoroid impact • Occasional small events (several times a year) • Most impacting particles are so small that the effects are barely noticeable • Angular impulse almost always <0.5 in.lb.sec (<0.06 Nms) ME176: Lecture 5
Cheap, Simple, Reliable Can still determine attitude Anarchy Happens: Unstabilized Pros Cons • Complicates Radio Antennas • Many missions impossible (eg imaging) • How to ensure thermal balance? • How to guard against spin-up? ME176: Lecture 5
Passive Stabilization: Gravity Gradient • Cheap, Simple, Reliable • Can still determine attitude • Typical pointing performance:±5° Pros Cons • Complicates Radio Antennas • Many missions impossible (eg imaging) • How to ensure thermal balance? • Major deployable • How simple & cheap is it? • Very weak GG Torque = 3w2∆I = 3 x (2π/6000s) 2 x 1 kg-m2 =3x10-6 N-m = 2 millionths of a foot pound ME176: Lecture 5
Cheap, Simple, Reliable Pointing sideways often handy Passive yet strong Passive Stabilization:Permanent Magnet Pros Cons • No yaw control • Flip 2x per orbit at poles • Damping? • Pointing typically ±5° ME176: Lecture 5
Only simple way to detect & point straight ahead Pointing sideways often handy Passive yet strong Pointing typically ±3° Passive Stabilization:Aerodynamic Pros Cons • Yaw damped but not controlled • Narrow altitude range => short lifetime • May require deployables • Damping may be necessary Aero Torque = 1/2rAV2(cp-cg) = 1/2 x 10-10kg/m3 x 1m2 x 70002 m2/s2 x 1 m (values @ 300 km) = 2.5 x 10-3 N-m = 1.9 thousandths of a foot- pound ME176: Lecture 5
Disturbances cancel / avg out Easy attitude determination Thermal rotisserie Typical pointing performance ±2° Spin-Stabilization Pros Cons A non-spinning body subjected to a torque impulse will begin to tumble and continue doing so. • Sensor deconvolution • Only one locale nadir pointing • CG Control A spinning body subjected to a torque impulse will precess its spin axis and otherwise will be unaffected ME176: Lecture 5
Spin Stabilization and Mom. of Inertia Minimum Axis Neutrally Stable IX < IY, IZ Unstable Intermediate Axis IY < IX < IZ For stable, minimum ACS design, SS prefers rotation about the principle axis aligned along the thrust vector, PX, where in general: IX > 2*(IY, IZ).Rotation is possible, with nutation damping, about minimum axis, where: PX, where in general: IX < IY, IZ. Absolutely Stable Principal Axis IX > IY, IZ ME176: Lecture 5
Disturbances & thermal loads cancel / avg out Inherently stabile Antennas broadside to earth (+ 3 dB) No moving parts Scan pattern for sensors Whole earth nadir pointing spinner Thompson (non) Spinner Momentum Wheel (non-spinner) Pros Cons • Solar panel usage (1/π) • Non-spinner requires single mo. wheel • CG Control Non-spinner can stare and track subsatellite and lateral to subsatellite points ME176: Lecture 5
Huge electric power gen. Stabile thermal / illumination environment High performance at low cost Pointing accuracy 0.2° Pointing knowledge 0.05° Sun (non) Spinner Pros Cons Coarse Sun Sensor (12) • Roll angle hard to determine • Attitude solution in umbra requires filter • CG critical - difficult with deployables Magnetometer Coil Driver X-coil Flight Computer Horizon Z-coil Crossing Indicator (HCI) Fine Sun Sensors (2) Y-coil Non-Spinner: add just one wheel. Q: On which axis? ME176: Lecture 5
Arbitrary pointing & staring Simple propulsion for station keeping Mass distribution not critical Three-Axis Stabilized Pros Cons • Difficult thermal control & power generation • High power required • Cost, mass & complexity • Spin-up • Wheel control • Lost wheel • Torque noise 4 wheels divide three axes ME176: Lecture 5
Vehicle Stabilization Methods ME176: Lecture 5
Spin vs. 3-Axis Stabilization ME176: Lecture 5
Attitude Control H/W: Torque Rods/Coils • A torquer consists of a coil (or two redundant coils) around a soft iron core. • Coil magnetizes the iron core • Long, slender core magnetizes easier and more uniformly than a short, “fat” bar. • Longer bar uses less power and coil mass. • Subject to hysteresis saturation effects. • Typically with wheels and/or gravity gradient booms. ME176: Lecture 5
Attitude Control H/W: Reaction Wheels • The positive momentum/torque axes are all 45 from the pitch axis • The projections of the momentum/torque axes onto the yaw/roll plane are all 45 from the yaw and roll axes ME176: Lecture 5
Reaction Wheel Bi-directional Operates over a large speed range (positive & negative) Generates torque by controlling motor current Momentum Wheel Unidirectional Operates in a narrow range about a high nominal speed Torque depends on difference between commanded speed & current speed Reaction Wheel vs. Momentum Wheel Mechanically, there is no difference between a reaction wheel and a momentum wheel. ME176: Lecture 5