Download
1 / 2
20 likes | 145 Views
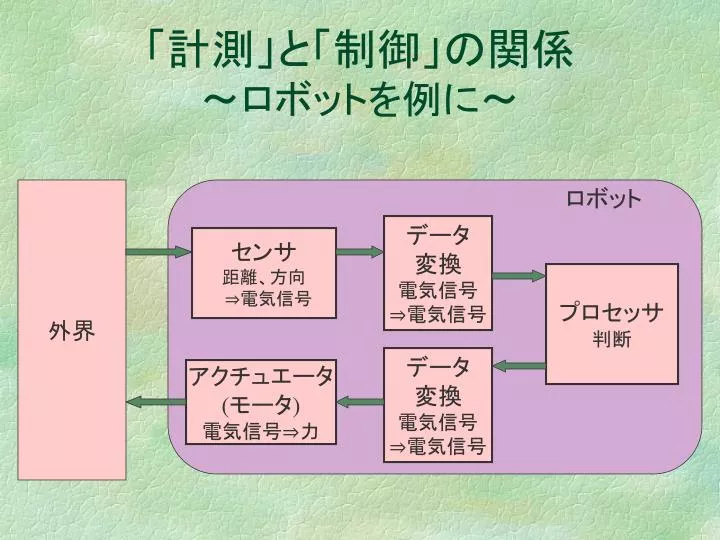
外界. ロボット. データ 変換 電気信号 ⇒電気信号. センサ 距離、方向 ⇒電気信号. プロセッサ 判断. データ 変換 電気信号 ⇒電気信号. アクチュエータ ( モータ ) 電気信号⇒力. 「計測」と「制御」の関係 ~ロボットを例に~. 「計測」と「制御」の関係 ~ロボットを例に~. 本講義!. 外界. ロボット. データ 変換 電気信号 ⇒電気信号. センサ 距離、方向 ⇒電気信号. プロセッサ 判断. データ 変換 電気信号 ⇒電気信号. アクチュエータ ( モータ ) 電気信号⇒力.

E N D
外界 ロボット データ 変換 電気信号 ⇒電気信号 センサ 距離、方向 ⇒電気信号 プロセッサ 判断 データ 変換 電気信号 ⇒電気信号 アクチュエータ (モータ) 電気信号⇒力 「計測」と「制御」の関係~ロボットを例に~
「計測」と「制御」の関係~ロボットを例に~「計測」と「制御」の関係~ロボットを例に~ 本講義! 外界 ロボット データ 変換 電気信号 ⇒電気信号 センサ 距離、方向 ⇒電気信号 プロセッサ 判断 データ 変換 電気信号 ⇒電気信号 アクチュエータ (モータ) 電気信号⇒力 知能制御システム生体情報工学 パワーエレクトロニクス 大実験[モーションコントロール] 情報通信工学
