Download
1 / 83
1.01k likes | 1.93k Views
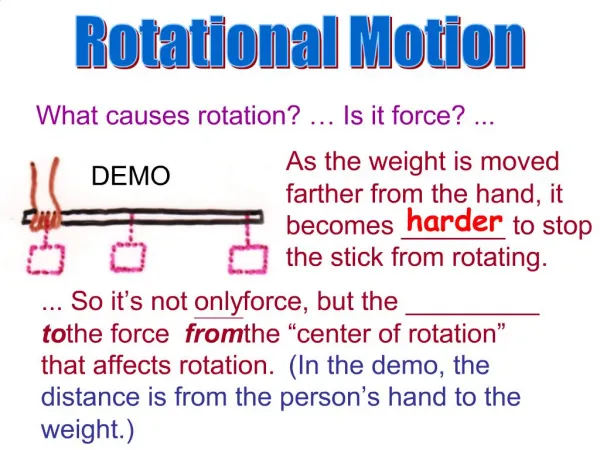
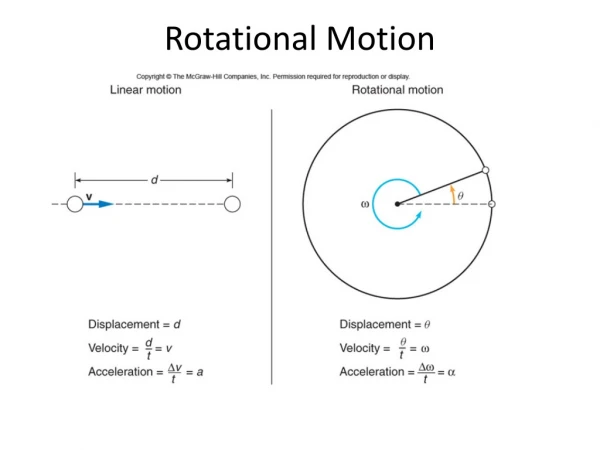
Rotational Motion. Hope you learned polar coordinates. Rotation. The motion of these objects cannot be easily described by using linear equations of motion. These involve a body that rotates about an axis that is stationary in some inertial frame of reference. Purely Rotational Motion.

E N D
Rotational Motion Hope you learned polar coordinates
Rotation • The motion of these objects cannot be easily described by using linear equations of motion. • These involve a body that rotates about an axis that is stationary in some inertial frame of reference.
Purely Rotational Motion • No Translational Motion • Rotation of a rigid body about an axis of rotation • Rigid body – object with definite shape. It will not deform. • The tire is not exactly a rigid body but work with me • Axis of Rotation – The line that passes through a point where all other points move around in circles
Velocity of a point • Rotating at 500 rpm • 0.5m diameter tire • P is on the rim
Velocity of a point • Rotating at 500 rpm • 0.5m diameter tire • Q halfway to the rim
Angular Quantities • Different points on a rotating rigid body have different linear velocities • This makes calculations clunky • Better to use angular velocities
Angular Displacement • Angle measured in radians • 1 Radian – angle subtended by an arc whose length is equal to the radius
Angular Velocity • Instantaneous angular velocity
Angular Velocity • Convention: • Counterclockwise rotation is positive • Clockwise rotation is negative • All points in a rotating object have the same angular velocity !
Angular Velocity • Define f as the frequency – number of complete revolutions per second • Period T – time to complete one revolution
Angular Velocity Vector • Direction of given by right hand rule • Useful for when the axis of rotation changes
Angular Acceleration • 500 rpm at time t0 • 600 rpm at time t
Angular Acceleration • Instantaneous acceleration • Convention: • All points in a rotating object have the same angular acceleration !
Angular Acceleration Vector • Direction of given by right hand rule • Useful for when the axis of rotation changes • If and are in the same direction, objects rotation is speeding up. If in opposite direction it’s slowing down
Relationship of linear and angular • Note: there is still a radial component of the acceleration
Example • You are asked to design an airplane propeller to turn at 2400 rpm. The forward airspeed of the plane is to be 75.0 m/s, and the speed of the tips of the propeller blades through the air must not exceed 270 m/s (a) What is the maximum radius the propeller can have? (b) With this radius, what is the acceleration of the propeller tip
Example • v fastest at the tip
Kinematics of Angular Motion • If αis constant
Kinematics of Angular Motion • If αis constant
Energy in Rotational Motion • A rotating rigid body, even with no translational motion, has kinetic energy • Imagine rigid body is made up of many small particles • Where ri is perpendicular distance to axis of rotation
Energy in Rotational Motion • Total kinetic energy is the sum of all the KE of the particles • ω is the same for all particles
Moment of Inertia • Moment of Inertia is the rotational analogue of mass • It is dependent on the distribution of the mass and the distance from the axis of rotation
Example • An engineer is designing a machine part consisting of three heavy disks linked by lightweight struts. (a) What is the moment of inertia of this body about an axis through the center of disk A? (b) What is the moment of inertia about an axis through the center of disks B and C? (c) If the body rotates about an axis through A perpendicular to the plane of the diagram with angular speed =4.0 rad/s, what is its kinetic energy?
Example • (a) • (b)
Example • (c) Moment of inertia is not an intrinsic property, it depends on the axis of rotation
Parallel-Axis Theorem • Let the moment of inertia about an axis that passes through the center of mass be • Then the moment of inertia through an axis parallel to the original axis, but displaced by some distance d is
Example • A uniform rigid rod has a mass of 3.6kg and length 0.30m. Find the moment of inertia perpendicular through one end?
Brief Review For a point at distance R away from the axis of rotation x=R θ v=R ω a=R α
Dynamics of Rotational Motion Torque, Angular Acceleration and Rotation of Rigid Bodies
Rotation of Rigid Bodies • Suppose you have a rigid body that is pinned at point C • Force F is applied to point P • The object will begin to rotate about the axis of rotation C ( to the screen)
Torque • Torque is the quantitative measure of the tendency of the force to change the rotational motion of a body. Rotational analog of force. • Represented by the symbol τ • Define: Torque is positive for counter-clockwise rotation and negative for clockwise rotation • Vector form • Magnitude • Has SI unit N·m eq(1)
Torque – Simple Example • To loosen a bolt at point O, a force F is applied on the wrench at point P. Calculate for the magnitude and direction of τ. • Two Solutions to = rFtan = F l • From right hand rule direction is outwards to the screen Ftan = F sinθ = Force perpendicular to r l = r sinθ= lever arm
Torque • The radial component of the force, FRad, has no effect on the rotation of the object. • The line of action of the force must not pass through the axis of rotation (sinθ≠ 0). • Always define torque with respect to a specific point. [Torque of F relative to point A] A
Torque and Angular Acceleration • Applying torque changes the rotational motion of a body, a change in its acceleration. • Assume the object is made up of small masses • For P1 apply Newton’s Second law F=ma Ftan,1=ma=m1r1α τ1=Ftan,1r=m1r12α 1
Torque and Angular Acceleration • Torque going through point 1 τ1=m1r12α • Net Torque τnet=Σ(miri2) α τnet= I α where I = Σ(miri2) • Moment of inertia, I, is the rotational analog for mass and it measures the resistance of an object to a change in angular acceleration. • Equation 2 is rotational analog to Newton’s 2nd law of motion. Note: valid only for rigid bodies. eq(2) 1
Not so Simple Example • 10-16. A 12.0 kg box resting on the horizontal, frictionless surface is attached to a 5.00 kg weight by a thin, light wire that passes over a frictionless pulley. The pulley has the shape of a uniform solid disk of mass 2.00 kg and a diameter of 0.500m. After the system is released, find: • (a) tension in the wire on both sides of the pulley • (b) the acceleration of the box • (c) the horizontal and vertical components of the force that the axle exerts on the pulley. 12 kg 5 kg
Problem 10-16 N • ∑F=ma • For box 1 T1=m1a • For box 2 m2g-T2=m2a • For pulley (for convenience let clockwise rotation be positive) ∑τ = I α (T2-T1)R= m3R2α/2 (T2-T1)=m3a/2 • Adding all three equations m2g=(m1+m2+m3/2)a (5)(9.8)=(12+5+2/2)a a=2.72 m/s2 T1 12 kg m1g T2 5 kg m2g F T1 T2 m3g