Download
1 / 26
260 likes | 452 Views
Chapter 3 Systems of Differential Equations. Matrix – Basic Definitions. Chapter 3 Systems of Differential Equations. Matrix – Properties. Matrices A, B and C with elements a ij , b ij and c ij , respectively. 1. Equality. For A and B each be m by n arrays.

E N D
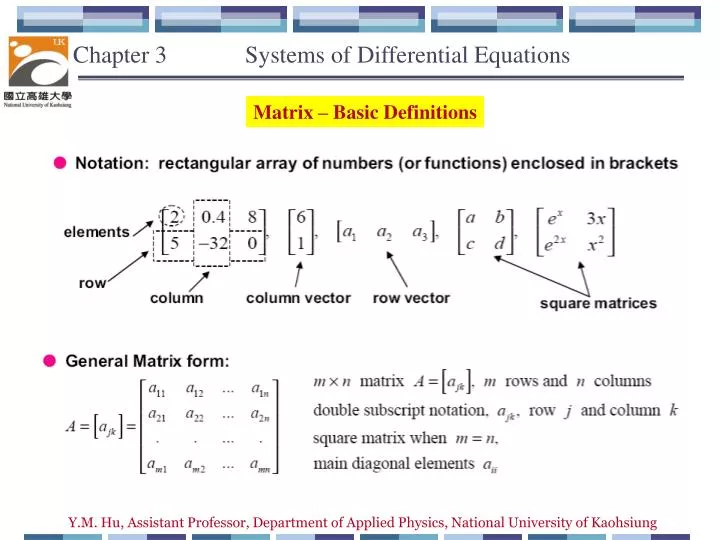
Chapter 3 Systems of Differential Equations Matrix – Basic Definitions Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Matrix – Properties Matrices A, B and C with elements aij, bij and cij, respectively. 1. Equality For A and B each be m by n arrays Matrix A = Matrix B if and only if aij = bij for all values of i and j. 2. Addition For A , B and C each be m by n arrays A + B = C if and only if aij + bij = cij for all values of i and j. If B = O (the null matrix), for all A : A + O = O + A = A 3. Commutative 4. Associative A + B = B + A (A + B) + C = A + (B + C) 5. Multiplication (by a Scalar) αA = (α A) in which the elements of αA are α aij Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Matrix Multiplication, Inner Product Matrix multiplication if and only if The product theorem For two n × n matrices A and B * In general, matrix multiplication is not commutative ! commutator bracket symbol But if A and B are each diagonal * associative * distributive Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Matrix Multiplication, Inner Product [2 × 3] × [3 × 2] = [2 × 2] For example : Successive multiplication of row i of A with column j of B – row by column multiplication Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Matrix Multiplication, Inner Product For example : [3 × 2] × [2 × 2] = [3 × 2] Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Unit Matrix, Null Matrix The unit matrix1 has elements δij, Kronecker delta, and the property that 1A = A1 = A for all A If A is an n × n matrix with determinant 0, then it has a unique inverse A-1 so that AA -1 = A -1 A = 1. The null matrixO has all elements being zero ! Exercise 3.2.6(a) : if AB = 0, at least one of the matrices must have a zero determinant. Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Direct product --- The direct tensor or Kronecker product If A is an m × m matrix and B an n × n matrix The direct product C is an mn × mn matrix with elements with For instance, if A and B are both 2 × 2 matrices The direct product is associative but not commutative ! Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Diagonal Matrices If a 3 × 3 square matrix A is diagonal In any square matrix the sum of the diagonal elements is called the trace. 1. The trace is a linear operation : 2. The trace of a product of two matrices A and B is independent of the order of multiplication : (even though AB BA) 3. The trace is invariant under cyclic permutation of the matrices in a product. Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Matrix Inversion An operator that linearly transforms the coordinate axes Matrix A Matrix A-1 An operator that linearly restore the original coordinate axes Where Cji is the jith cofactor of A. The elements and For example : The cofactor matrix C Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Matrix Inversion For example : |A| = (3)(-1-0)-(-1)(-2-0)+(1)(4-1) = -2 The elements of the cofactor matrix are Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Special matrices • A matrix is called symmetric if: AT = A • A skew-symmetric (antisymmetric) matrix is one for which: AT = -A • An orthogonal matrix is one whose transpose is also its inverse: AT = A-1 Any matrix symmetric antisymmetric Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Inverse Matrix, A-1 The reverse of the rotation Transpose Matrix, Defining a new matrix such that holds only for orthogonal matrices ! Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Eigenvectors and Eigenvalues A is a matrix, v is an eigenvector of the matrix and λ the corresponding eigenvalue. This only has none trivial solutions for det (A- λ I) = 0. This gives rise to the secular equation for the eigenvalues: Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Eigenvectors and Eigenvalues Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Eigenvectors and Eigenvalues Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Example 3.5.1 Eigenvalues and Eigenvectors of a real symmetric matrix The secular equation λ = -1. x+y = 0, z = 0 λ = -1,0,1 Normalized λ = 0 x = 0, y = 0 Normalized λ = 1 -x+y = 0, z = 0 Normalized Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Example 3.5.2 Degenerate Eigenvalues The secular equation λ = -1. 2x = 0, y+z = 0 λ = -1,1,1 Normalized λ = 1 -y+z = 0 (r1 perpendicular to r2) Normalized λ = 1 (r3 must be perpendicular to r1 and may be made perpendicular to r2) Normalized Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Conversion of an nth order differential equation to a system of n first-order differential equations Setting , , , …… …… Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Example : Mass on a spring assume eigenvector eigenvector Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Homogeneous systems with constant coefficients in components y1y2-plane is called the phase plane P : (y1,y2) = (0,0) Critical point : the point P at which dy2/dy1 becomes undetermined is called Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Five Types of Critical points Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Criteria for Types of Critical points P is the sum of the eigenvalues, q the product and the discriminant. Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Stability Criteria for Critical points Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations Example : Mass on a spring p = -c/m , q = k/m and = (c/m)2-4k/m No damping c = 0 : p = 0, q > 0 a center Underdamping c2 < 4mk : p < 0, q > 0, < 0 a stable and attractive spiral point. Critical damping c2 = 4mk : p < 0, q > 0, = 0 a stable and attractive node. Overdamping c2 > 4mk : p < 0, q > 0, > 0 a stable and attractive node. Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations No basis of eigenvectors available. Degenerate node If matrix A has a double eigenvalue since If matrix A has a triple eigenvalue Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung
Chapter 3 Systems of Differential Equations No basis of eigenvectors available. Degenerate node Y.M. Hu, Assistant Professor, Department of Applied Physics, National University of Kaohsiung