Download
1 / 1
20 likes | 186 Views
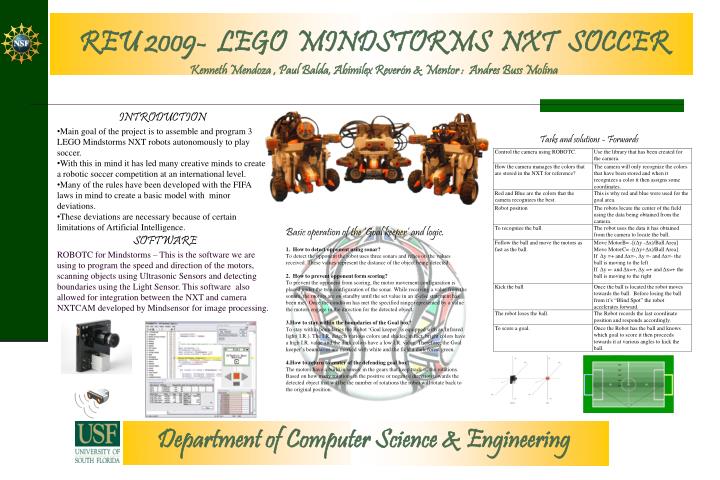
REU 2009- LEGO MINDSTORMS NXT SOCCER Kenneth Mendoza , Paul Balda, Abimilex Reverón & Mentor : Andres Buss Molina. INTRODUCTION Main goal of the project is to assemble and program 3 LEGO Mindstorms NXT robots autonomously to play soccer.

E N D
REU 2009- LEGO MINDSTORMS NXT SOCCER Kenneth Mendoza , Paul Balda, Abimilex Reverón & Mentor : Andres Buss Molina • INTRODUCTION • Main goal of the project is to assemble and program 3 LEGO MindstormsNXT robots autonomously to play soccer. • With this in mind it has led many creative minds to create a robotic soccer competition at an international level. • Many of the rules have been developed with the FIFA laws in mind to create a basic model with minor deviations. • These deviations are necessary because of certain limitations of Artificial Intelligence. Tasks and solutions - Forwards Basic operation of the ‘Goal keeper’ and logic.1. How to detect opponent using sonar?To detect the opponent the robot uses three sonars and relies on the values received. These values represent the distance of the object being detected.2. How to prevent opponent form scoring?To prevent the opponent from scoring, the motor movement configuration is placed under the tree configuration of the sonar. While receiving a value from the sonars, the motors are on standby until the set value in an if-else statement has been met. Once the condition has met the specified range represented by a value the motors engage in the direction for the detected object.3.How to stay within the boundaries of the Goal box?To stay within boundaries the Robot ‘Goal keeper’ is equipped with an Infrared light( I.R.). The I.R. detects various colors and shades; in fact, bright colors have a high I.R. value and the dark colors have a low I.R. value. Therefore, the Goal keeper’s boundaries are marked with white and the field a dark forest green.4.How to return to center of the defending goal box?The motors have a build in sensor in the gears that keep track of the rotations. Based on how many rotations in the positive or negative direction towards the detected object that will be the number of rotations the robot will rotate back to the original position. SOFTWARE ROBOTC for Mindstorms – This is the software we are using to program the speed and direction of the motors, scanning objects using Ultrasonic Sensors and detecting boundaries using the Light Sensor. This software also allowed for integration between the NXT and camera NXTCAM developed by Mindsensorfor image processing. Department of Computer Science & Engineering