Download
1 / 26
290 likes | 531 Views
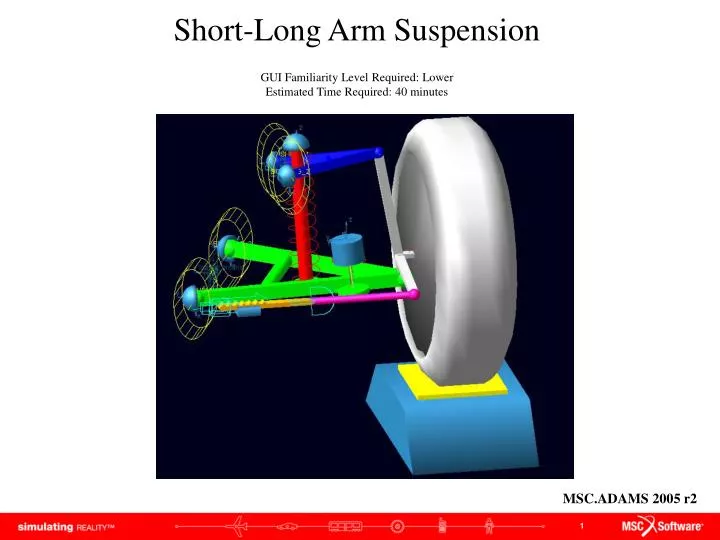
Short-Long Arm Suspension GUI Familiarity Level Required: Lower Estimated Time Required: 40 minutes. MSC.ADAMS 2005 r2. Topics Covered. In this tutorial you will learn how to:. Create three-component force vector Modify force vector Create simple harmonic function Create force vector

E N D
Short-Long Arm Suspension GUI Familiarity Level Required: Lower Estimated Time Required: 40 minutes MSC.ADAMS 2005 r2
Topics Covered In this tutorial you will learn how to: • Create three-component force vector • Modify force vector • Create simple harmonic function • Create force vector • Create preloaded translational spring damper • Deactivate joint • Create bushings You will need to download SLA_Suspension_start.cmd to begin this tutorial If you have any difficulties, import the “SLA_Suspension_shortcut_1.cmd” file and proceed from pg 11 If you have any difficulties, import the “SLA_Suspension_shortcut_2.cmd” file and proceed from pg 13 If you have any difficulties, import the “SLA_Suspension_shortcut_3.cmd” file and proceed from pg 15 If you have any difficulties, import the “SLA_Suspension_shortcut_4.cmd” file and proceed from pg 17 If you have any difficulties, import the “SLA_Suspension_complete.cmd” file and proceed from pg 24
Short-Long Arm Suspension Problem Add bushings, translational spring damper and forces to a short-long arm suspension mechanism.
What You Should Accomplish When you complete this tutorial you will have a working ADAMS model of a short-long arm suspension system.
Importing Model • Select Import a file radio button • Click OK a b • File Import window will open • Right-click File To Read text field, select Browse • Locate saved file SLA_Suspension_start.cmd • Click Open • Click OK d c e f
Create Force Vector (Three-Component Force) • Select Force Vector (Three-Component Force) from Forces tool stack • Turn on damping coefficient (K) checkbox and enter (0.525Ne/m/sec ) • Turn on stiffness coefficient (C) check box and enter (375Ne/mm) • Click spindle right click on center of tire and select patch right click on center of tire and select patch.MAR130 d a b c
Modify Marker • Right-click force, select Marker: MARKER_151 Modify • Enter 0.0, 0.0, 0.0 in Orientation text field • Click OK a b c
Rename • Right-click on force, select Force_Vector: VFORCE_1 Rename • Enter .sla_complete.tire_compliance in New Name text field • Click OK b c a
Modify Force Vector • Right Click on force, select Force_Vector: tire_compliance Modify • Enter 0 in X Force and Y Force text field • Click button next to Z Force text field b a c
Create Impact Function • Enter: impact(DZ(vert_ref,contact_surface,ground.contact_patch), • VZ(vert_ref,contact_surface,ground.contact_patch),290,375.0,1.01,0.525,3) • into Define a runtime function text field • Click OK a b
Add Translational Joint Motion • Select Translational Joint Motion from Motion Driver tool stack • Click patch_to_ground (translational joint) • Right-click on motion, select Motion: road_motion Modify • Click button next to Function (time) text field a c d b
Create a Simple Harmonic Function • Select Math Function from pull • down menu • Select Simple Harmonic • Click Assist button • Enter time in X text field • Enter 0 in Shift text field • Enter 3500d in Frequency text field • Enter 90.0d in Phase Shift text field • Enter 50 in Amplitude and Average • value of Displacement text field • Click OK • Make sure the Define a runtime • function text field reads: • SHF(time, 0.0, 50.0, 3500.0d, 90.0d, 50.0) • Click OK j d e f c a g h b i k
Create Force (Single Component) • Select force (Single Component) from Force tool stack • Select Two Bodies from Run-time Direction pull down menu • Click ground lca ground.POINT_7 lca.POINT_8 a c b
Modify Force • Rename force to .sla_complete.bump_stop • Modify Force, click button next to Function text field • Enter • impact(DM(point_8, point_7),VR(point_8, point_7) • ,51,5779,1.01,5.8,0.5) • In Define a runtime function text field • Click OK • Click OK a c b e d
Create Translational Spring Damper • Select Translational Spring Damper from Force text field • Click lca.POINT_6 ground_POINT_5 b a
Modify Spring Damper • Right-click spring, select Spring: SPRING_1 Modify • Enter (60(newton/mm)) in Stiffness Coefficient text field • Enter (0.46(nextown-sec/mm)) in Damping Coefficient • Enter 0.0 Preload text field • Enter (404mm) in Length at Preload text field • Click OK b c a d e f
Deactivate Joint • Right-click revolute joint, select Joint: lca_to_ground (De)activate • Turn off Object Active and Object’s Dependents Active checkbox • Click OK • Repeat for Joint: uca_to_ground b c d a
Create Bushing • Select Bushings from forces tool stack • Click uca ground ground.POINT_1 b a
Modify Bushing • Right click bushing, select Bushing: BUSHING_1 Modify • Enter 2627.0, 2627.0, 876.0 in Stiffness text field • Enter 1.75, 1.75,0. 875 in Damping text field • Enter 0.0, 0.0, 0.0 in Preload, Stiffness, Damping and Preload text field • Click OK b c a d e
Create Bushings Create 3 more Bushings Bushing 1 & 2 Stiffness: 2627.0, 2627.0, 876.0 Damping: 1.75, 1.75, 0.875 Bushing 3 & 4 Stiffness: 3503.0, 3503.0, 1401.0 Damping: 2.62, 2.62, 1.4 2 1 3 4
Model This is what your screen should look like when your model is complete
Create Point-to-Point Measure • Click Build menu Measure Point-to-Point New • Right-click in To Point text field, select Marker Browse • Select sla_complete spindle wheel center • Click OK b a c d
Create Point-to-Point Measure • Enter wheel_height in Measure Name text field • Select spindle.wheel_center in To Point text field • Select ground.wheel_center in From Point text field • Verify that Translational displacement is selected from Characteristic pull down menu • Select Z radio button from Component menu • Click OK a b c d e f
Verify Your Model Verify your model, should have 11 degrees of freedom and no redundant constraints Run simulation (Duration = 10, Step Size = 0.1)
Topics Covered In this tutorial you will learn how to: • Create three-component force vector • Modify force vector • Create simple harmonic function • Create force vector • Create preloaded translational spring damper • Deactivate joint • Create bushings
Best Practices • Make sure all forces, joints and bushings are correctly oriented • Make sure the functions are correctly set • Verify the positions of joints, forces, bushings • Check values of bushings, spring and force