Download
1 / 29
310 likes | 502 Views
Control Systems Engineering Introduction IESL-Part III 2013. What is a Control System? Why need Control? What is the subject about?. History of Control Engineering . * Greece (BC) – Float regulator mechanism * Holland (16 th Century)– Temperature regulator.

E N D
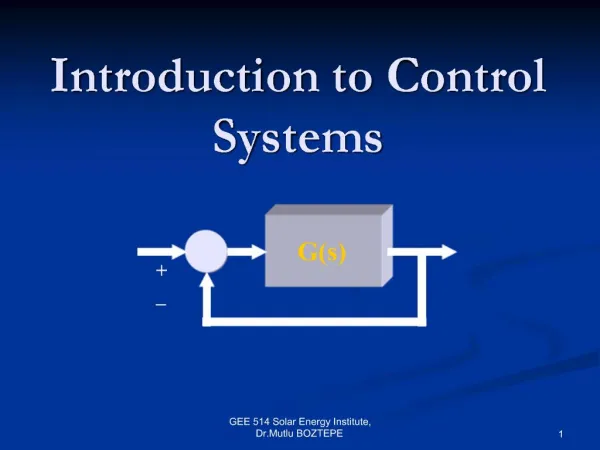
Control Systems Engineering Introduction IESL-Part III 2013
What is a Control System? Why need Control? What is the subject about?
History of Control Engineering * Greece (BC) – Float regulator mechanism * Holland (16th Century)– Temperature regulator * Watt’s FlyballGovernor (18thcentury)
History of Control Engineering Water-level float regulator
Control System Concepts • A system is a collection of components which are co-ordinated together to perform a function. • Systems interact with their environment across a separating boundary. • The interaction is defined in terms of variables. • system inputs • system outputs • environmental disturbances
Subsystem Disturbance Inputs System Outputs System Environment Control Inputs
System Variables • The system’s boundarydepends upon the defined objective function of the system. • The system’s function is expressed in terms of measured output variables. • The system’s operation is manipulated through the control input variables. • The system’s operation is also affected in an uncontrolled manner through the disturbance input variables.
Car and Driver Example • Objective function: to control the direction and speed of the car. • Outputs: actual direction and speed of the car • Control inputs: road markings and speed signs • Disturbances: road surface and grade, wind, obstacles. • Possible subsystems: the car alone, power steering system, braking system, . . .
Antenna Positioning Control System • Original system: the antenna withelectric motor drive systems. • Control objective: to point theantenna in a desired reference direction. • Control inputs: drive motor voltages. • Outputs: the elevation and azimuth of the antenna. • Disturbances: wind, rain, snow.
Studying Part III Control Engineering • Objective function: • Outputs: • Control inputs: • Disturbances: • Subsystems:
Traffic Control Lights • Objective function: • Outputs: • Control inputs: • Disturbances: • Subsystems:
Control System Design Objectives • Primary Objectives: 1. Dynamic stability 2. Accuracy 3. Speed of response • Addition Considerations: 4. Robustness (insensitivity to parameter variation) 5. Cost of control 6. System reliability
Response of a position control system showing effect of high and low controller gain on the output response
Master-Slave of Humanoid Robot Laser cutting robot Brain control hand Video Segments Inverted Pendulum Balancing Robot
Types of Control system Configurations Open-Loop Control Systemsutilize a controller or control actuator to obtain the desired response. Closed-Loop Control Systemsutilizes feedback to compare the actual output to the desired output response. Multivariable Control System
Open loop Control Close loop control
Control System Components • System or process (to be controlled) • Actuators (converts the control signal to a power signal) • Sensors (provides measurement of the system output) • Reference input (represents the desired output) • Error detection (forms the control error) • Controller (operates on the control error to form thecontrol signal, sometimes called compensators)
Feedback • Feedback is a key tool that can be used to modify the behavior of a system. • This behavior altering effect of feedback is a key mechanism that control engineers exploit deliberately to achieve the objective of acting on a system to ensure that the desired performance specifications are achieved.
Examples of Control SystemsShip Autopilot Control System • Actual heading is measured by a gyro-compass (or magnetic compass), compared with desired value. Error are send to autopilot (Course-keeping system) • Actual rudder angle is sensed, and autopilot controls the ship course by steering-gear.
Examples of Control SystemsRoom Temperature Control System • Proportional mode: Better accuracy, complex • On/Off control mode: Thermostatic control, simple, low accuracy
Examples of Control SystemsAircraft Elevator Control System • Hydraulic servomechanisms have a good power/weight ratio, and are ideal for applications that require large forces to be produced by small and light devices.
Summary We have introduced: • Why do we need Control? • What is a Control System? • What are the main performance we care for a control system? • Feedback is very important.
Summary The central problem in control is to find a technically feasible way to act on a given process so that the process behaves, as closely as possible, to some desired behavior. Furthermore, this approximate behavior should be achieved in the face of uncertainty of the process and in the presence of uncontrollable external disturbances acting on the process.
Did you get answers to following?...... • What is a Control System? Why need Control? What is the subject about?