Download
1 / 25
270 likes | 423 Views
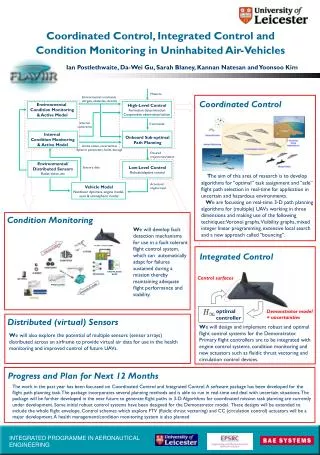
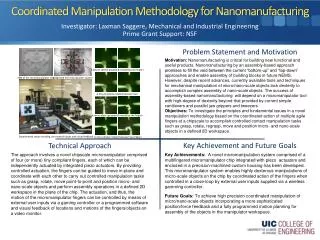
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION. Andreu Fargas-Marquès Ramon Costa-Castelló Luis Basañez Institut d’Organització i Control de Sistemes Industrials Universitat Politècnica de Catalunya Barcelona-SPAIN. SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION.

E N D
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Andreu Fargas-Marquès Ramon Costa-Castelló Luis Basañez Institut d’Organització i Control de Sistemes Industrials Universitat Politècnica de Catalunya Barcelona-SPAIN
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation Error Definition Potential Energy Complete Formulation Introduction Implementation Experimental Setup Equation Discretization Experimental Results Conclusions
Introduction SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION • Coordinated Manipulation mayapply undesired forces over manipulated object • Internal forces sources • inaccurate modeling • lack of synchronization • Goal • Keep internal forces under control • Position controlled Manipulators • Decoupled controllers
Introduction SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION • Impedance Control • Impedance control is a control strategy to manage the interaction with an unstructured environment. • Previous Works • Impedance over n(Kosuge et al 1997),(Ferreti et al 2000) • Impedance over nx SO(3) (Natale et al, 1999) • Proposed approach • Impedance over SE(3)
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation Error Definition Energy Study Complete Formulation Introduction Implementation Experimental Setup Equation Discretization Experimental Results Conclusions
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation • Classical Formulation • Mass + Spring + Damping • System Behaviour: • Motion Equation • Energy formulation wii=100 kg (kg.m), bii=266 N.s/m (N.s/rad), kii=711N/m (N/rad)
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation • SE(3) Formulation • End effector position and orientation can be seen as an SE(3) element. • Homogenous matrix (4x4) • Position • Rotation Matrix
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Error Definition • To be consistent with SE(3), E should be defined in terms of the group operation. • Exploits group structure • Inertial Frame Independent
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Complete Formulation • Spatial Impedance defined over the error (E). • Energies: • Kinetic Energy • Potential Energy
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Complete Formulation • Newton Law over SE(3) • Complete Formulation wii=100 kg (kg.m), bii=266 N.s/m (N.s/rad), kii=711N/m (N/rad)
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Complete Formulation • Internal Forces • Complete Scheme • Steady State
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation Error Definition Energy Study Complete Formulation Introduction Implementation Experimental Setup Equation Discretization Experimental Results Conclusions
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Implementation • Control Scheme • Steps • Impedance Generator Impedance equations discretization • PD controller design
Experimental Setup SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION • 2 Stäubli RX-90 Robots • 1 JR3 Force Sensors • Crimson Elan SGI Workstation
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Equation Discretization • Problem: • Impedance equations over SE(3) are nonlinear • Robots are seen as discrete time systems (T=48 ms) • Proposed Approach • Online-Integration Method • Integrator: P-2/PC-3/C-3 - R.M. Howe [Howe, 1991]
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Equation Discretization • Ex: • wii=100 kg (kg.m), bii=266 N.s/m (N.s/rad), kii=711N/m (N/rad). • fext= 1 N (N.m)
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation Error Definition Energy Study Complete Formulation Introduction Implementation Experimental Setup Equation Discretization Experimental Results Conclusions
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Experimental Results Individual Manipulation- Impedance Generator
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Experimental Results Individual Manipulation- Impedance Generator
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Experimental Results • 1 Robot Impedance Behaviour • wii=100 kg (kg.m), bii=266 N.s/m (N.s/rad), kii=711N/m (N/rad).
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Experimental Results COORDINATED MANIPULATION
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Experimental Results COORDINATED MANIPULATION
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Experimental Results • COORDINATED MANIPULATION • wii=1000 kg (kg.m), bii=4000 N.s/m (N.s/rad), kii=4000 N/m (N/rad). X axis trajectory Multi axis trajectory
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Impedance Formulation Error Definition Energy Study Complete Formulation Introduction Implementation Experimental Setup Equation Discretization Experimental Results Conclusions
SPATIAL IMPEDANCE CONTROL IN COORDINATED MANIPULATION Conclusions • Impedance behaviour defined over SE(3). • On-line Integration Methodology to compute trajectory in Real Time. • Validated in a real Experimental Setup. (Preliminary Results) • Future works: • Both arms under impedance behaviour. • Saturation Effects Study • Discretization Equations • Adaptative Behaviours • Haptic Manipulation