Download
1 / 28
280 likes | 307 Views
Join us in developing a fleet of highly compatible robots to assist in urban search and rescue efforts after recent natural disasters. Learn about design criteria, proposal requirements, scenarios, and challenges faced. Explore drive trains, center of gravity, and more.

E N D
Urban Search and Rescue Initiative 2005 Avi Siegel, Director of Carnegie Urban Rescue Force Eddie Lu, Chief Evaluation Officer Eric West, West Campus Architect Debbie Hugh, Pittsburgh Architect David Rosenberg, Control and Vision Expert David Choi, Graduate Student Jason Geist, LEGOLand Consultant General Robotics 2005
Introduction • The recent natural disasters in Louisiana and Pakistan had highlighted a great need by rescue workers for improved rescue efforts. • There is a growing demand for highly mobile, all terrain and easy to use mobile robots to assist in Urban Search and Rescue efforts. General Robotics 2005
Purpose • Carnegie Urban Rescue Force (CURF) has started a initiative with the General Robotics Class of Fall 2005 to develop a fleet of highly compatible robots to help in the rescue effort. General Robotics 2005
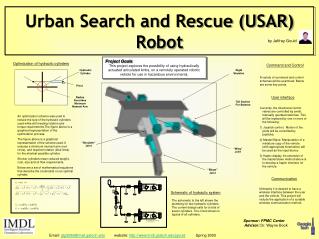
Design Criteria • Size Constraints • Width: 6.0” • Depth: 8.5” • Height: 6.0” • Includes the vision system • Tele-operation • Vision System • Extra Parts • Extra LEGO motor • $50 spending limit for LEGO parts General Robotics 2005
Design Proposal • Write-up: • Basic schematics • Descriptions • Special features • Obstacles • Climbing • Steering • Controllability • Hand in by Tuesday, October 25 • Note: You cannot continue on with the prototyping phase if your design proposal does not meet these requirements General Robotics 2005
Last Year’s Scenario • Location: Scaife Building • Disaster: Hurricane • Rescue Efforts: H1ghlander General Robotics 2005
Building Floor Plan General Robotics 2005
Zone by Zone Analysis • Zone 1: Courtyard • Stability: High • Zone 2: Room with Stairs • Stability: Medium • Zone 3: Titled On-ramp • Stability: Low-Medium • Zone 4: Danger Room • Stability: Low General Robotics 2005
Common Difficulties • Rubble and debris • Collapsed objects • Unstable structures • Narrow hallways • Obstacles • Stairs General Robotics 2005
This Year’s Scenario • Campus History • Volcano • Rescue Team General Robotics 2005
Building Floor Plan General Robotics 2005
Designing Good Robot Platform for Adverse Terrain • Drive trains revisited • Tank Treads • Differential drive configurations • Center of Gravity • Mechanical Robustness • Suspensions • Testing General Robotics 2005
Drive Trains Revisited • High-torque situations • Back driving • Foreign objects • Weak links General Robotics 2005
Tank Treads In the past, people forgot: • Slack on top or bottom depending upon location of driven wheel • Idler on top of tread can increase tension and area of drive wheel in contact with tread General Robotics 2005
Differential Drive • Advantages in steering • What happens if you lose a DOF? General Robotics 2005
Center of Gravity • Masses • Handy Board • LEGO motors • Added mass (batteries, fishing weights, etc.) • High CG is bad • Consider CG in relation to length and width • Traction General Robotics 2005
Mechanical Robustness • Masses • Internal forces • Odd forces • No parts sticking out • Zip Ties General Robotics 2005
Suspensions • 1st: Wheel/track suspension • squishyness of wheels • span of tracks • 2nd: Active Dampening Suspensions • Tube things in kits • LEGO shock absorbers • Random foam, springs • 3rd: Passive suspensions General Robotics 2005
Testing • Torque Tests • Stall drive wheels • Hill Tests • Various terrain • Ground clearance • Break-over angle • Ridges General Robotics 2005
Camera and Camera Mount General Robotics 2005
Pan and Tilt Camera Mount • Camera moves • Robot doesn’t • Greater visibility • Obstacles General Robotics 2005
Control and Control Issues • Robot has 1st person perspective • Pilot has 3rd person perspective (sometimes occluded) • Moveable Camera • Where to put intelligence? • Autonomy? General Robotics 2005
Control: Robot Intelligence • Robot has encoders • go(int inches) • turn(int degrees) • Ground sensors • feelers • Inclination sensors • mercury switches • rolling ball inclinometers, • accelerometers • Internal sensor • Self-diagnostics General Robotics 2005
Control: Robot Autonomy • Autonomous functions to deploy equipment • Autonomously navigate occluded areas (i.e. wall following) • Automate compounded functions such as expanding General Robotics 2005
“Smart Mechanism” • Mechanisms that compound DOFs • Can do different things depending on which way turned • Release mechanisms • Expanding Mechanisms • Locking Mechanisms • Can lock an expansion or an appendage into position • E-Mail me (and other TAs) for consulting General Robotics 2005
Marsupial Robots Robin Murphy, USF Shape Reconfiguring robots Inuktun.com Asymmetry NASA Rovers Current off road vehicle examples Land Rover Jeep Hummer Moon Rover Mars Rovers ATVs The Animal (ok, old) Other Toys Neat Ideas General Robotics 2005
Design Exploration • Qualitative analysis • Mobility, user friendliness, coolness • Quantitative analysis • Top speed, ground clearance, torque • For the proposal, we would like you to think numerically. General Robotics 2005
Prototype Evaluation • 6 of the 8 checkpoints • Ability to move and turn, • Use the camera • Surmount various obstacles. • None of these require autonomy. • This must be done during lab hours. • November 1st at 8pm (the latest) General Robotics 2005