Download
1 / 5
50 likes | 141 Views
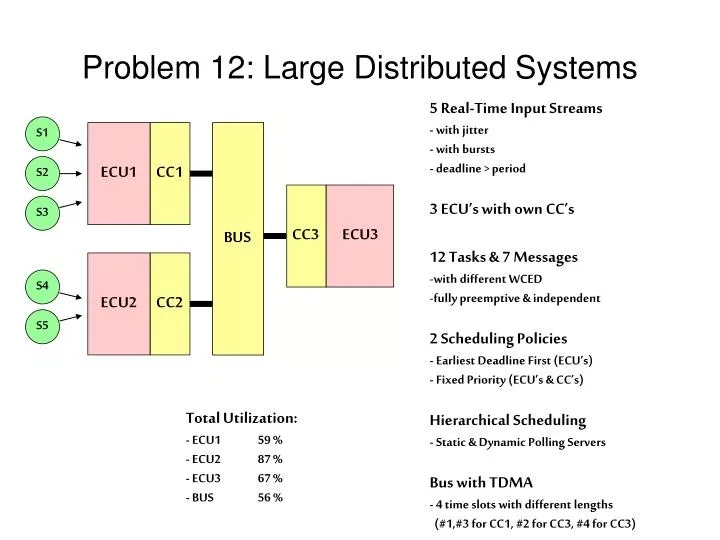
Problem 12: Large Distributed Systems. 5 Real-Time Input Streams - with jitter - with bursts - deadline > period 3 ECU’s with own CC’s 12 Tasks & 7 Messages with different WCED fully preemptive & independent 2 Scheduling Policies - Earliest Deadline First (ECU’s)

E N D
Problem 12: Large Distributed Systems • 5 Real-Time Input Streams • - with jitter • - with bursts • - deadline > period • 3 ECU’s with own CC’s • 12 Tasks & 7 Messages • with different WCED • fully preemptive & independent • 2 Scheduling Policies • - Earliest Deadline First (ECU’s) • - Fixed Priority (ECU’s & CC’s) • Hierarchical Scheduling • - Static & Dynamic Polling Servers • Bus with TDMA • - 4 time slots with different lengths • (#1,#3 for CC1, #2 for CC3, #4 for CC3) S1 S2 ECU1 CC1 S3 CC3 ECU3 BUS S4 ECU2 CC2 S5 Total Utilization: - ECU1 59 % - ECU2 87 % - ECU3 67 % - BUS 56 %
Within FP-blocks priorities are assigned from top (highest) to bottom (lowest). Communication tasks that share a TDMA slot use FP-scheduling. ECU1 CC1 BUS (TDMA) S1 CC3 ECU3 FP FP S1 FP FP T1.1 PS C1.1 T1.2 PS T1.3 S2 T2.1 C1.2 EDF S3 T3.1 T2.2 C3.2 S3 T3.3 FP PS C2.1 T3.2 ECU2 CC2 C3.1 T4.2 FP T5.2 S4 T4.1 C4.1 S5 T5.1 C5.1
Questions • Is it schedulable? • Minimum reqiured buffers? • End-to-end delays of all streams?
Periodic Server • A polling server can be thought of as a periodic task T (p, e). • When the server-task T is selected to run by the scheduler, the server-task checks whether workload is waiting to be processed by the server. • If yes, the server will provide e resources to process the waiting workload. • If no work is available for the server, the task will immediately be finished, i.e. the server will not check for arriving work anymore until the next period starts. • While the server is processing, it is preemptable. When it is preempted, it is put back into the ready-queue. • If the server could not provide e resources during a time interval T, even though there was always enough work available, then this is treated the same as a deadline-miss. I.e. the system is considered to be not schedulable.