Download
1 / 1
10 likes | 92 Views
Results Two way repeated measures ANOVA revealed a significant main effect of light level ( p < .01) and a significant main effect of vehicle type ( p < .001). The ANOVA also revealed a significant interaction between light level and vehicle type ( p < .01). Introduction

E N D
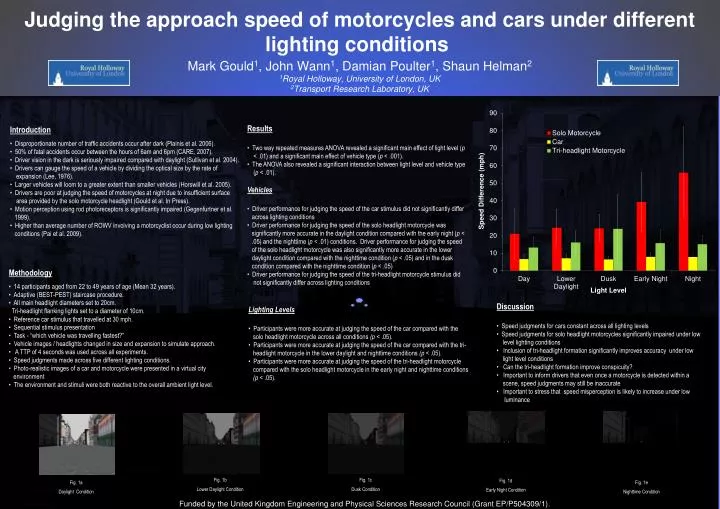
Results • Two way repeated measures ANOVA revealed a significant main effect of light level (p < .01) and a significant main effect of vehicle type (p < .001). • The ANOVA also revealed a significant interaction between light level and vehicle type (p < .01). • Introduction • Disproportionate number of traffic accidents occur after dark (Plainis et al. 2006). • 50% of fatal accidents occur between the hours of 6am and 6pm (CARE, 2007). • Driver vision in the dark is seriously impaired compared with daylight (Sullivan et al. 2004). • Drivers can gauge the speed of a vehicle by dividing the optical size by the rate of expansion (Lee, 1976). • Larger vehicles will loom to a greater extent than smaller vehicles (Horswill et al. 2005). • Drivers are poor at judging the speed of motorcycles at night due to insufficient surface area provided by the solo motorcycle headlight (Gould et al. In Press). • Motion perception using rod photoreceptors is significantly impaired (Gegenfurtner et al. 1999). • Higher than average number of ROWV involving a motorcyclist occur during low lighting conditions (Pai et al. 2009). Judging the approach speed of motorcycles and cars under different lighting conditions Mark Gould1, John Wann1, Damian Poulter1, Shaun Helman21Royal Holloway, University of London, UK2Transport Research Laboratory, UK • Vehicles • Driver performance for judging the speed of the car stimulus did not significantly differ across lighting conditions • Driver performance for judging the speed of the solo headlight motorcycle was significantly more accurate in the daylight condition compared with the early night (p < .05) and the nighttime (p < .01) conditions. Driver performance for judging the speed of the solo headlight motorcycle was also significantly more accurate in the lower daylight condition compared with the nighttime condition (p < .05) and in the dusk condition compared with the nighttime condition (p < .05) • Driver performance for judging the speed of the tri-headlight motorcycle stimulus did not significantly differ across lighting conditions • Methodology • 14 participants aged from 22 to 49 years of age (Mean 32 years). • Adaptive (BEST-PEST) staircase procedure. • All main headlight diameters set to 20cm. • Tri-headlight flanking lights set to a diameter of 10cm. • Reference car stimulus that travelled at 30 mph. • Sequential stimulus presentation • Task - “which vehicle was travelling fastest?” • Vehicle images / headlights changed in size and expansion to simulate approach. • A TTP of 4 seconds was used across all experiments. • Speed judgments made across five different lighting conditions. • Photo-realistic images of a car and motorcycle were presented in a virtual city environment • The environment and stimuli were both reactive to the overall ambient light level. • Discussion • Speed judgments for cars constant across all lighting levels • Speed judgments for solo headlight motorcycles significantly impaired under low level lighting conditions • Inclusion of tri-headlight formation significantly improves accuracy under low light level conditions • Can the tri-headlight formation improve conspicuity? • Important to inform drivers that even once a motorcycle is detected within a scene, speed judgments may still be inaccurate • Important to stress that speed misperception is likely to increase under low luminance • Lighting Levels • Participants were more accurate at judging the speed of the car compared with the solo headlight motorcycle across all conditions (p < .05). • Participants were more accurate at judging the speed of the car compared with the tri- headlight motorcycle in the lower daylight and nighttime conditions (p < .05). • Participants were more accurate at judging the speed of the tri-headlight motorcycle compared with the solo headlight motorcycle in the early night and nighttime conditions (p < .05). Fig. 1b Lower Daylight Condition Fig. 1c Dusk Condition Fig. 1d Early Night Condition Fig. 1a Daylight Condition Fig. 1e Nighttime Condition Funded by the United Kingdom Engineering and Physical Sciences Research Council (Grant EP/P504309/1).