Download
1 / 1
10 likes | 179 Views
WLAN Radiation Search Robot D. Kristen, S. Metzker, T. Wadl , O. Mondl Supervisor: DI H. Feichtinger Division of computer sciences. GOAL: Development of an autonomous driving WLAN measuring apparatus : Autonomous driving robot

E N D
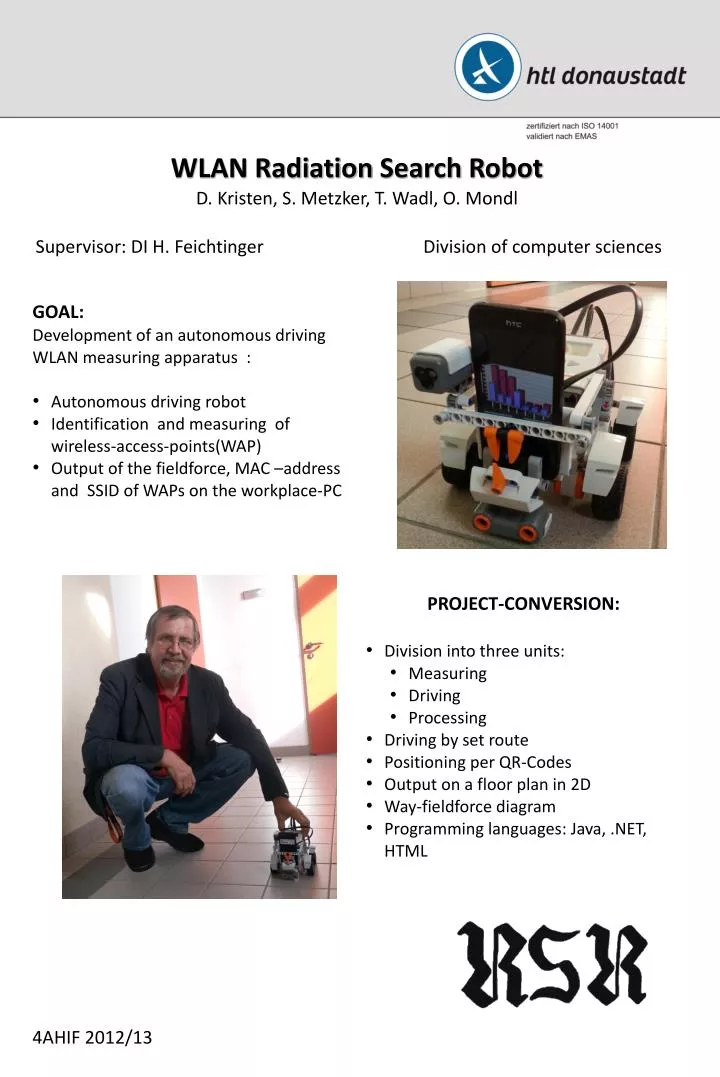
WLAN Radiation Search Robot D. Kristen, S. Metzker, T. Wadl, O. Mondl Supervisor: DI H. Feichtinger Division ofcomputersciences GOAL: Development of an autonomous driving WLAN measuring apparatus : • Autonomous driving robot • Identification and measuring of wireless-access-points(WAP) • Output of the fieldforce, MAC –address and SSID of WAPs on the workplace-PC PROJECT-CONVERSION: • Division into three units: • Measuring • Driving • Processing • Driving by set route • Positioning per QR-Codes • Output on a floor plan in 2D • Way-fieldforce diagram • Programming languages: Java, .NET, HTML 4AHIF 2012/13